Ознакомьтесь с Условиями пребывания на сайте Форнит Игнорирование означет безусловное согласие. СОГЛАСЕН
Книги сайта: «Мировоззрение»,
«Познай себя» , «Основы адаптологии» ,
Фантазмы , Лекторий МВАП , «Что такое Я» , «Наука», «Субъективность».
Чтобы оставлять сообщения нужно авторизоваться.
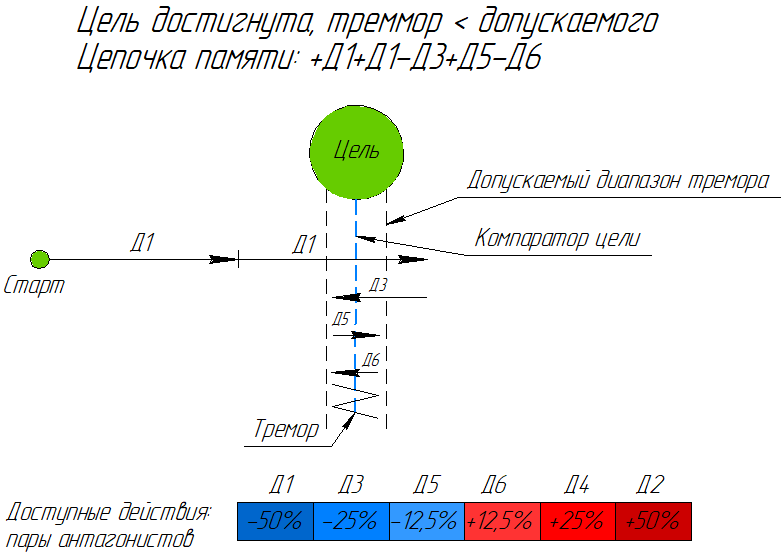
Тема форума: «Бот на ГО»
| Сообщений: 605 Просмотров: 44809 | | Вся тема для печати |
Это тема – только для причастных к пониманию модели МВАП и текущим проблемам предметной области «Схемотехника адаптивных нейросетей». Прошу посторонним быть очень корректным и зря не спамить. Здесь будет обсуждаться текущая реализация последовательности развития прототипа индивидуальной системы адаптивности Beast.
Телеграм-канал: https://t.me/thinking_cycles
nan - админ
- админ Род:  Сообщений: 12304 личная фото-галерея  Оценок: 39 Оценок: 39список всех сообщений clons Сообщение № 47906 показать отдельно Май 22, 2022, 07:15:52 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа:  Благодарность от: daxon71 Благодарность от: daxon71 | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 47909 показать отдельно Май 23, 2022, 10:44:37 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 47911 показать отдельно Май 23, 2022, 03:50:37 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons История редактирования (2)
Сообщение № 47912 показать отдельно Май 23, 2022, 04:40:21 PM ответ -только после авторизации | |||||||||
| « Последнее редактирование: 2022-06-18 08:45:07 Palarm » Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 47913 показать отдельно Май 24, 2022, 08:28:45 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 47914 показать отдельно Май 24, 2022, 11:18:35 AM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 47916 показать отдельно Май 25, 2022, 09:12:20 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 47917 показать отдельно Май 25, 2022, 10:46:04 AM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 47918 показать отдельно Май 26, 2022, 05:12:08 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 47919 показать отдельно Май 26, 2022, 06:29:47 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons История редактирования (2)
Сообщение № 47920 показать отдельно Май 27, 2022, 12:37:40 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons История редактирования (5)
Сообщение № 47921 показать отдельно Май 31, 2022, 10:12:54 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 47922 показать отдельно Май 31, 2022, 05:24:40 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 47923 показать отдельно Май 31, 2022, 07:14:14 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 47924 показать отдельно Июнь 01, 2022, 11:00:28 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
Всего Тем: 1929 Всего Сообщений: 47876 Всего Участников: 5224 Последний зарегистрировавшийся: David
Страница статистики форума | Список пользователей | Список анлимитов
Последняя из новостей:
Страница статистики форума | Список пользователей | Список анлимитов
Про то, что мешает развитию научных идей в Российском обществе, делая практически невозможным их развитие: Особенности культуры и этики в Российской науке.
Пользователи на форуме:| Обнаружен организм с крупнейшим геномом Новокаледонский вид вилочного папоротника Tmesipteris oblanceolata, произрастающий в Новой Каледонии, имеет геном размером 160,45 гигапары, что более чем в 50 раз превышает размер генома человека. | Тематическая статья: Вырождение конференций в пиар-акции |
Рецензия: Комментарии к книге Иллюзия себя: Что говорит нейронаука о нашем самовосприятии Г. Бернс | Топик ТК: Элементы конечных образов восприятия |
| Из коллекции изречений: >>показать еще... |