Род: 
Palarm
 - админ - админ
Сообщений: 2771
|
|
154. « Сообщение №47384, от Март 21, 2021, 05:15:33 PM» |
|
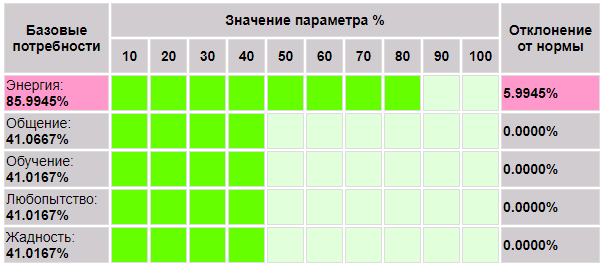
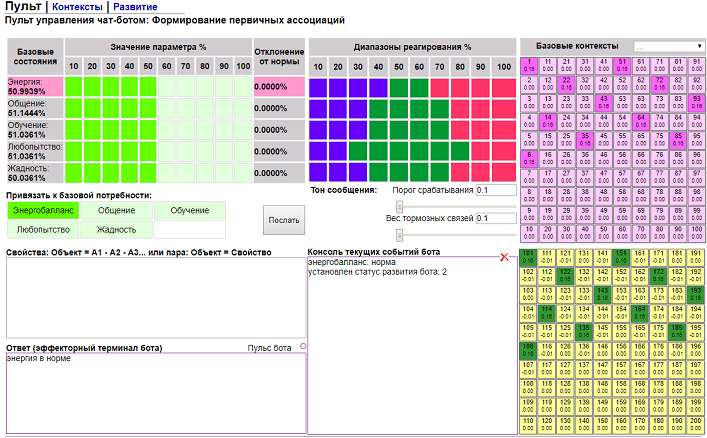
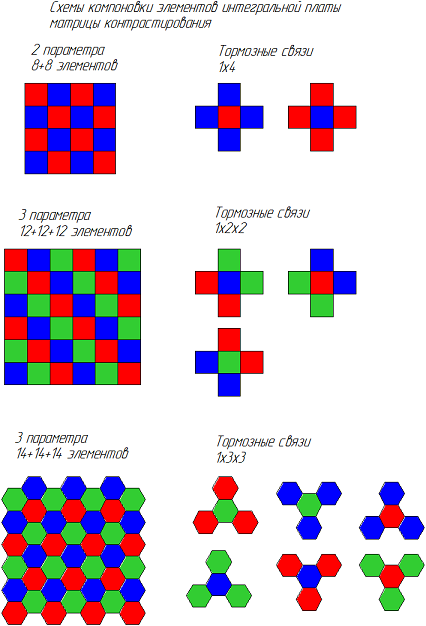
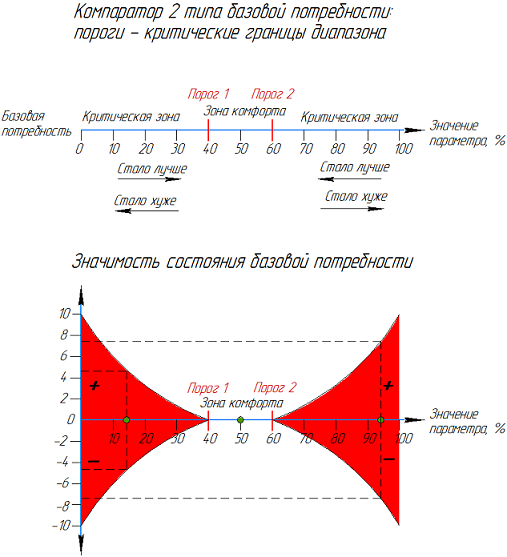
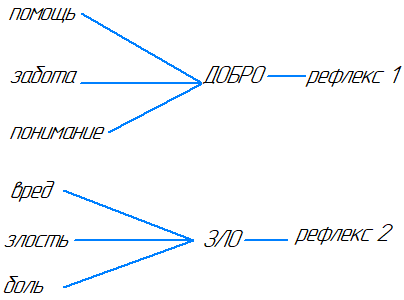
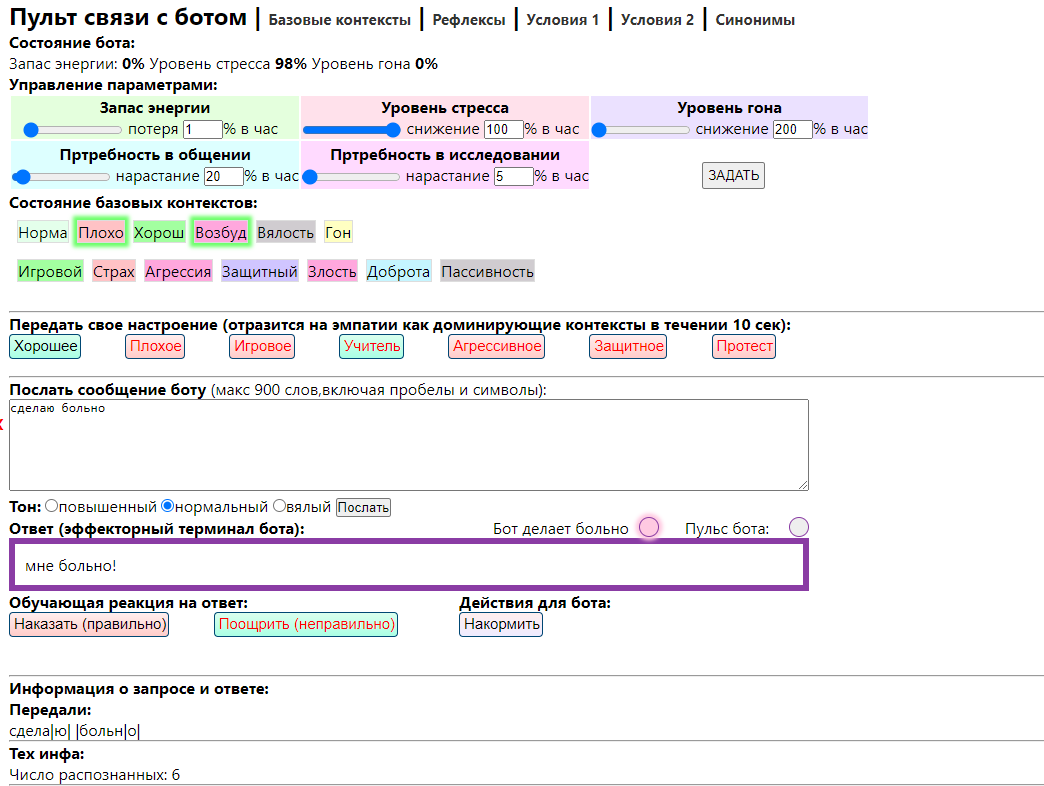
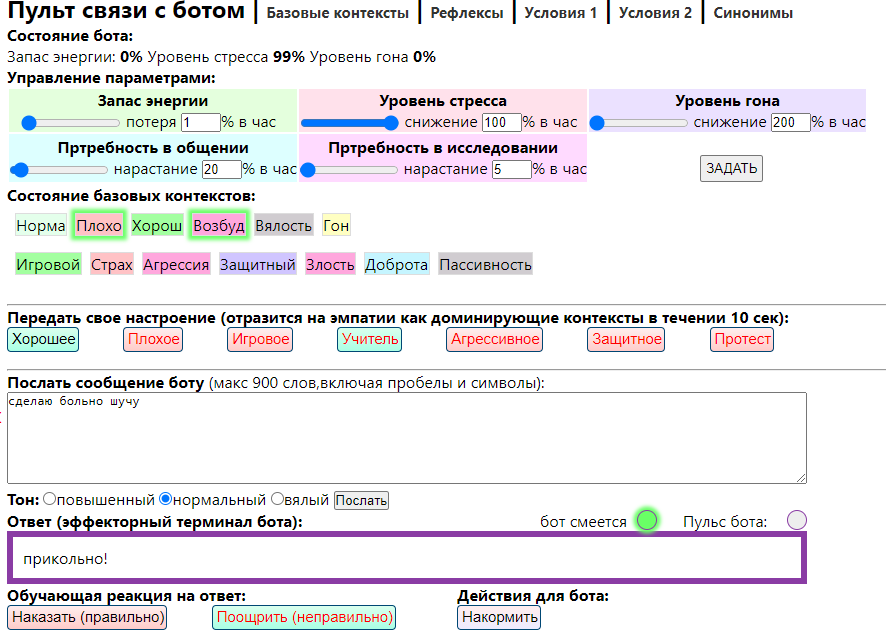
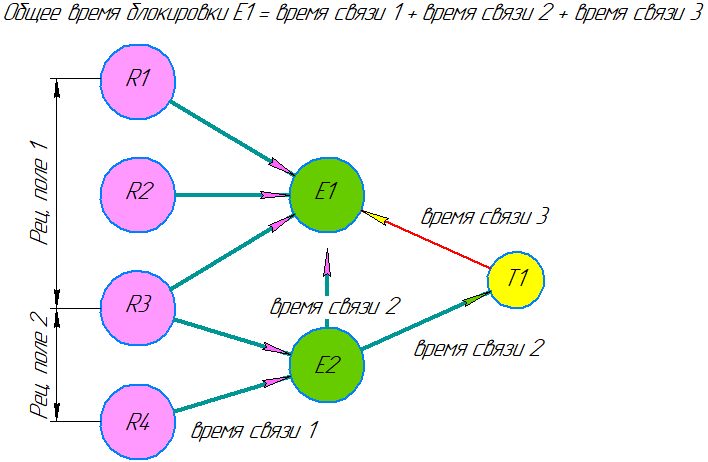
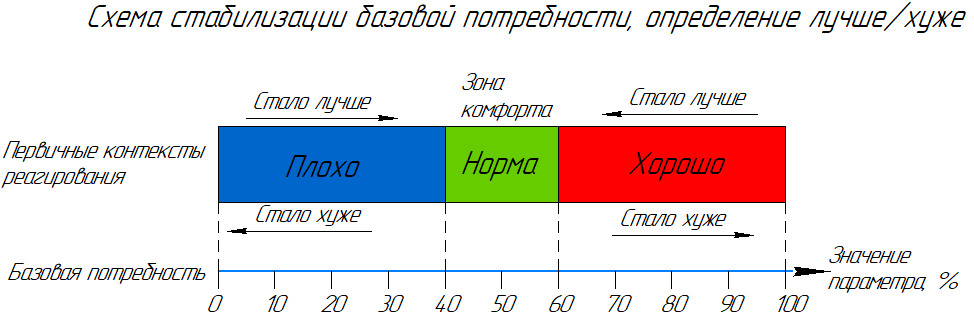
Ну ты и улетел! Вот что значит опыт. Чудес не бывает, настоящие открытия делают профессионалы. У меня все намного скромнее, я по прежнему бодаюсь с безусловными рефлексами, пытаясь симулировать эволюционный процесс, чтобы они сами определялись. Я начал с того, что стал отталкиваться от текущего уровня заряда бота. Процесс адаптации системы жизнеобеспечения означает поддержание ее оптимальных параметров при внешних воздействиях, стремящихся вывести систему из равновесия. Без адаптации она просто разрушится, оказавшись в одном из крайних состояний: чрезмерного истощения или возбуждения. Такой системой у бота, по аналогии с живыми организмами, является гомеостаз, который имеет следующие параметры: - Энергетический баланс – стабилизируемый гомеостазом оптимальный диапазон уровня энергии бота
- Ответный рефлекс – механизм, возвращающий систему в равновесие
- Пульс – внутренний циклический процесс, «сердце бота», служащий индикатором его состояния. Он подразумевает расход энергии, с каждым ударом пульса уровень энергии уменьшается.
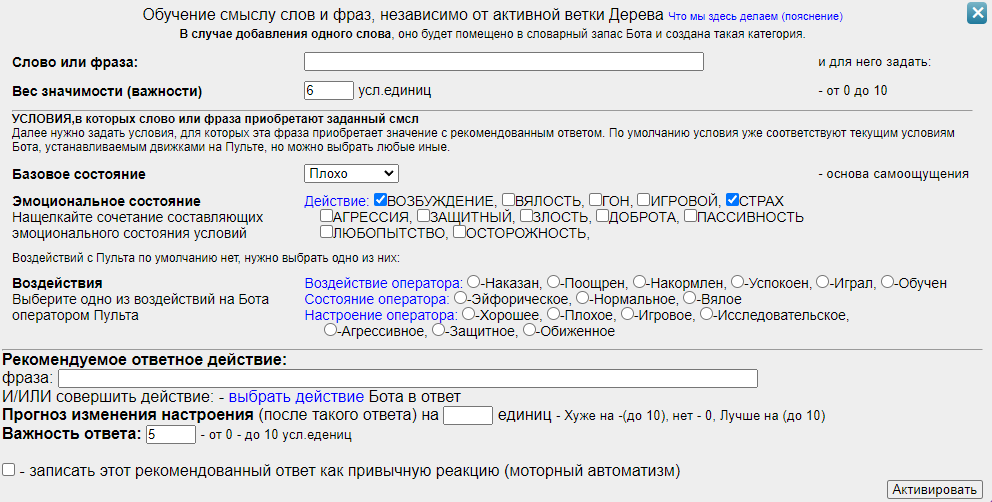
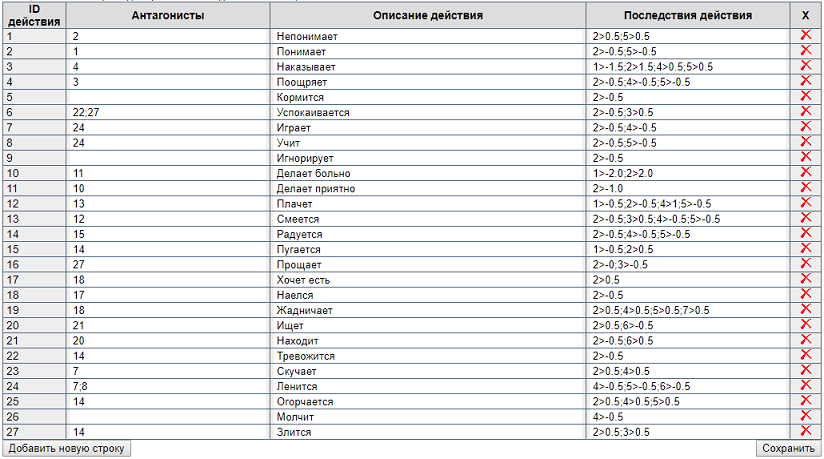
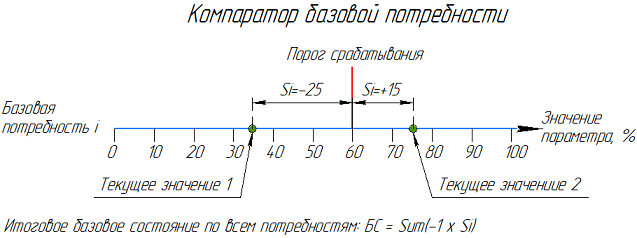
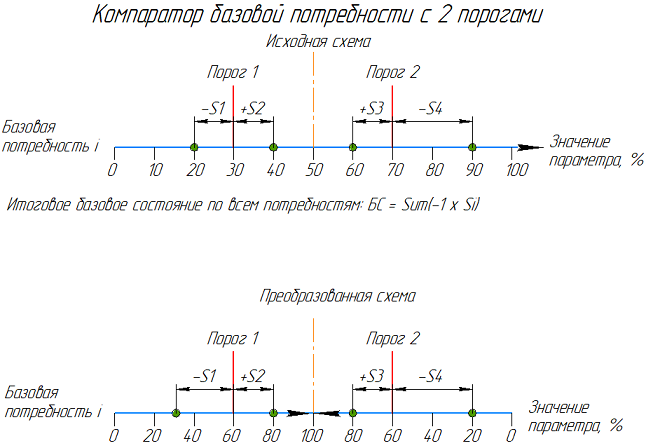
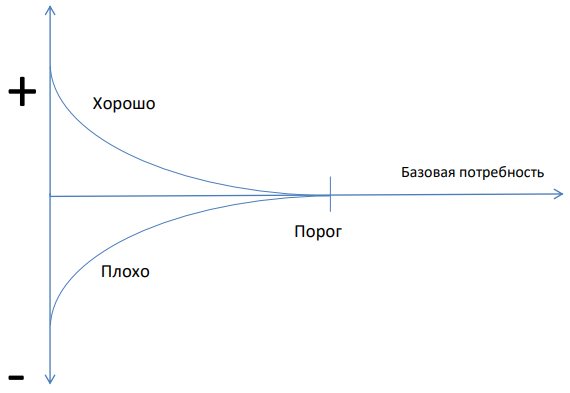
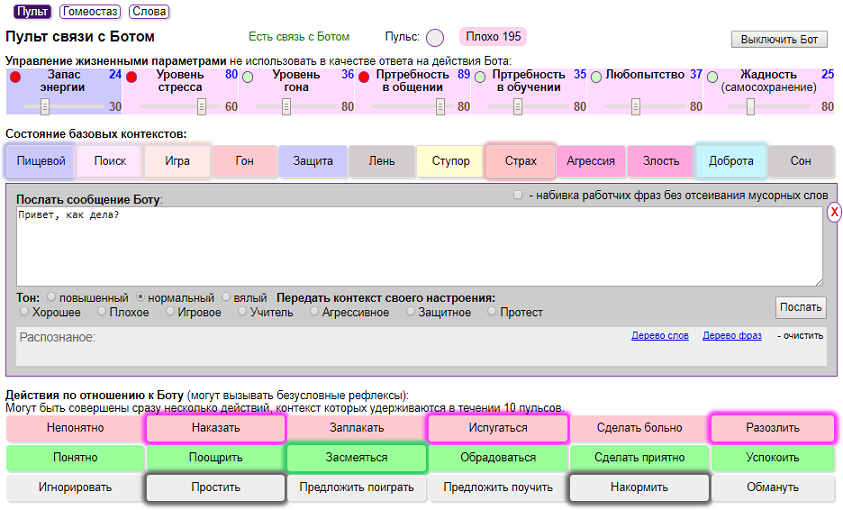
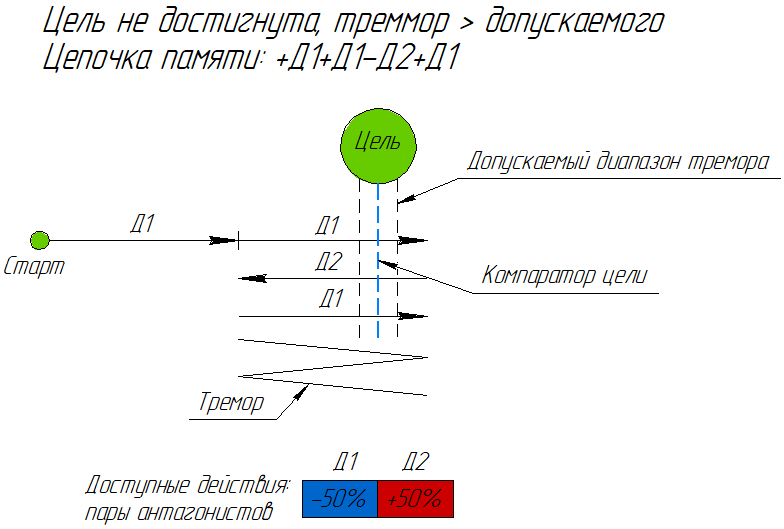
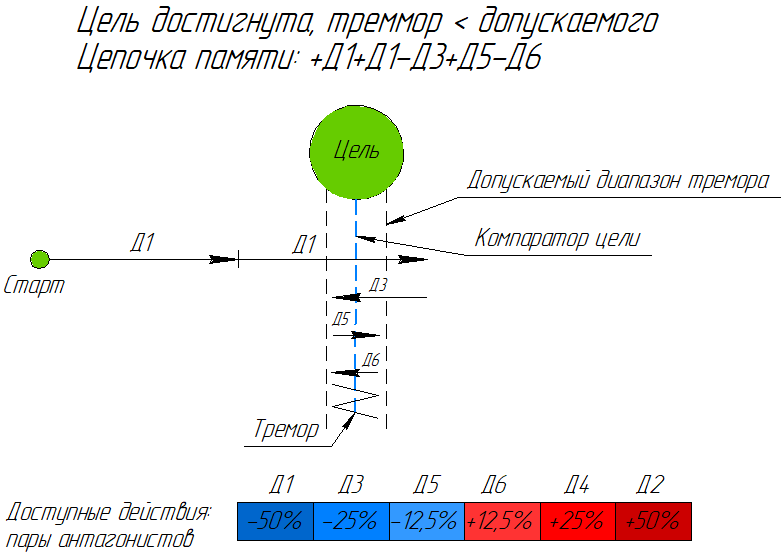
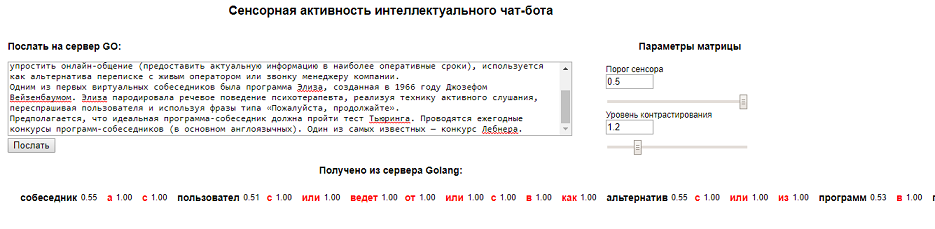
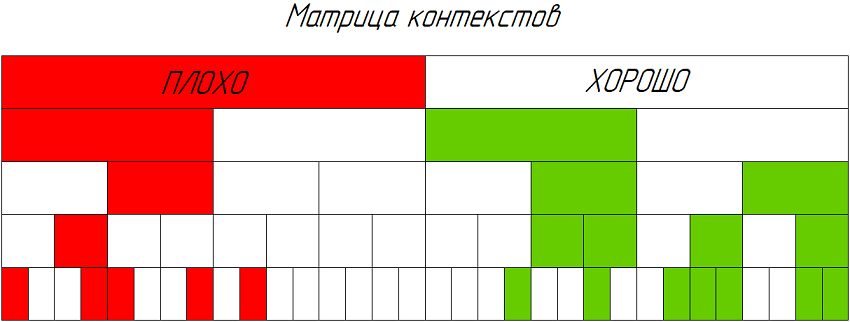
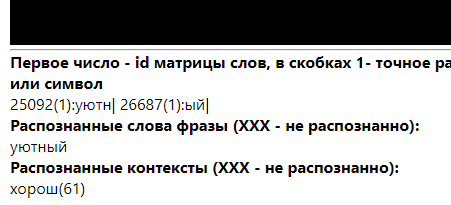
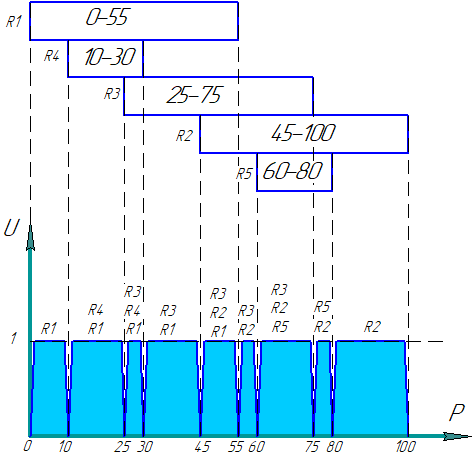
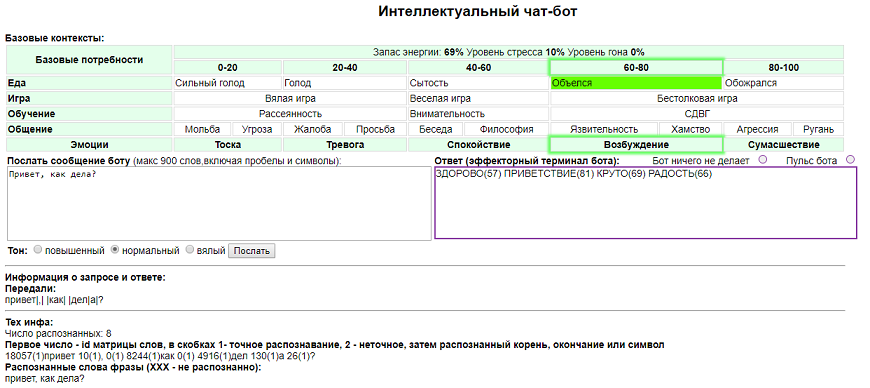
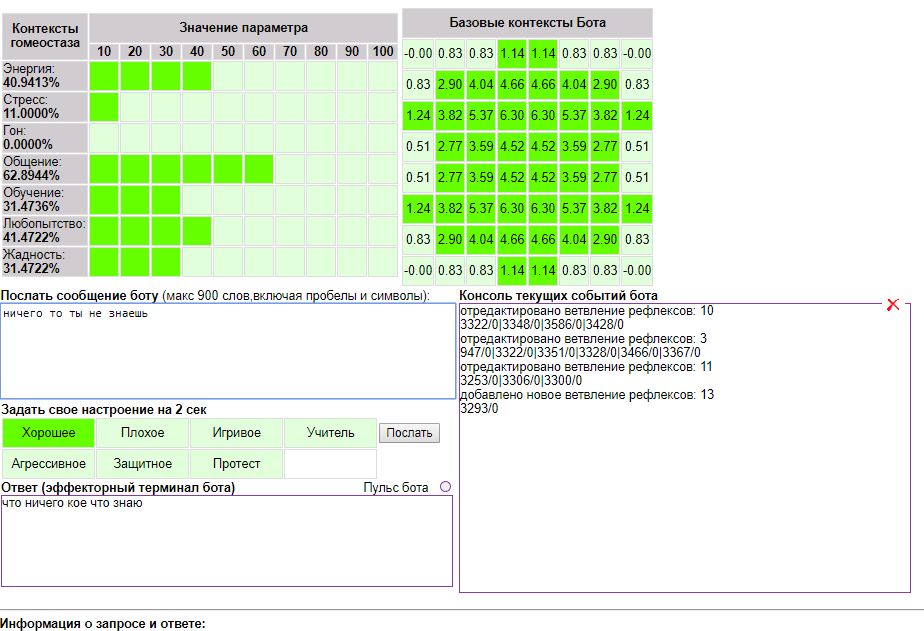
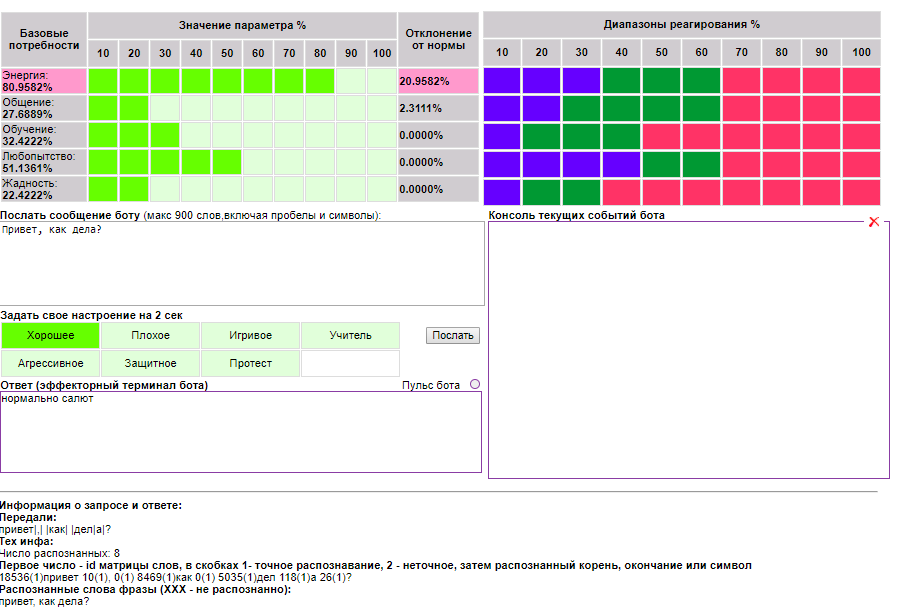
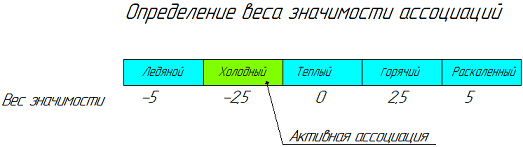
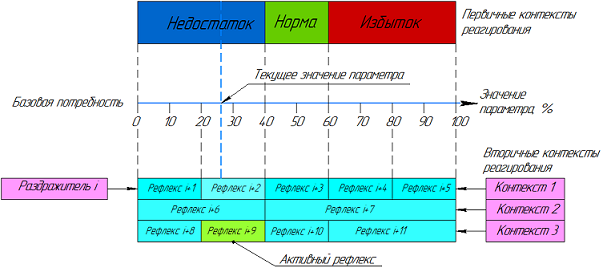
Изменение гомеостаза бота происходит из за внешних воздействий, под которыми подразумеваются текстовые фрагменты, генерируемые оператором, другим ботом, найденные ботом самостоятельно в сети. Они могут быть как угнетающими, так и возбуждающими. Угнетающие отбирают энергию бота, возбуждающие наоборот, дают энергию. Поддержка оптимального уровня энергии означает стабилизацию энергетического заряда бота вокруг какой-то величины. Отклонения от нее означают недостачу или избыток энергии, что одинаково плохо, потому, что при недостаче бот переходит в угнетенное состояние вплоть до «остановки сердца», а при избытке в чрезмерное возбуждение вплоть до «разрыва сердца». Выход за пределы критических уровней энергии означает «смерть» бота, прекращение пульсации и реагирования на внешние раздражители. При этом есть область изменений энергозатрат колебаний пульса в пределах, незначительно влияющих на состояние бота и это его зона комфорта, к которой он постоянно стремится, но из которой его постоянно выводят внешние воздействия и естественные потери энергии при пульсации, что провоцирует бота на ответные рефлексы, задача которых вернуть его в комфортную зону. Бот подобно живому организму получает внешние разрушительные/восстановительные воздействия, сдвигающие его энергетический баланс, через текстовые слова/фразы. Такое взаимодействие имитирует физический контакт животного с объектами в реальном мире, поэтому слова/фразы для запуска процесса адаптации бота должны иметь как минимум два свойства: «токсичность» и «питательность». Первое уменьшает энергию бота, второе увеличивает. Понятие «плохо/хорошо» для бота они обретают смотря по его текущему энергетическому балансу. Если бот находится в зоне пониженной энергии, то «хорошим» становится для него контакт с «питательными» сенсорами, а если в зоне повышенной – то наоборот, «хорошими» становятся «токсичные» контакты, так как они помогают более эффективно сбросить излишки энергии. Поэтому адаптация бота строится не по принципу избегания «плохого» и стремления к «хорошему», а вокруг стабилизации энергетического баланса. Это не прямая аналогия, хотя и похожая, с питанием животного, потому, что рефлексия бота подразумевает активное использование обоих свойств, а сами объекты становятся то полезными, то вредными, и от этого бот выстраивает свою рефлексию. Но возникает проблема с глобальным определением для бота, что есть яд, а что еда. Нельзя просто присвоить слову/фразе статус полезное/вредное в отрыве от контекста, в котором они были сказаны. В реальности у животных таким контекстом служит интонация, жестикуляция, внутренний субъективный образ «говорящего» и окружающего мира. Но у бота только один текстовый канал восприятия, поэтому ему необходимо передавать дополнительные параметры сообщения, служащие аналогом интонации и жестикуляции, из которых определяется итоговый контекст сообщения. Кроме того, реагирование должно быть в основном на фразы, так как отдельные слова в большинстве случаев многозначны. Поэтому ответная реакция бота формируется на комбинации слов собеседника (макросенсоры), текущего внутреннего состояния бота и предполагаемого внутреннего состояния собеседника, которое бот прогнозирует по своему состоянию в той же ситуации, но на стороне партнера. На первом этапе обучения тон сообщения является единственным показателем для определения негативно-позитивного воздействия на бота. Это процесс задания базовых простейших свойств объектов (слова и фразы) вселенной бота, потому, что на стадии инициализации объекты для бота это никак на него не воздействующие, и потому ничего не значащие наборы символов. То есть оператор на этом этапе вводится не для того, чтобы «научить» чему то бота, а по причине отсутствия симулятора реальности, в которой бот естественным образом эволюционируя, коммуницируя и конкурируя с другими ботами, сформировал бы аналогичные рецепторы. В реальности животному, чтобы понять свойства объекта, надо с ним вступить в контакт. Тогда физические процессы закономерно сдвинут его гомеостаз в одну из сторон. Чтобы аналогичное происходило с ботом, объекты его вселенной надо инициализировать. Это делается оператором, который указывает, какое воздействие несет его текст на бота. Величина воздействия текста определяется по его длине. Запоминая эти соответствия у бота начинает формироваться простейший опыт: он связывает слова с тоном сообщения и начинает реагировать на них соответственно, симулируя реальную физическую реакцию. В результате они начинают приобретать для него смысл: полезное/вредное. В дальнейшем, по мере обретения более сложного опыта определения «токсичности», такое поведение трансформируется в более сложную рефлексию избирательного поглощения текста, «пищевые предпочтения», а так же позволит боту целенаправленно воздействовать на собеседника. Ответ бота сам по себе так же энергетически затратный, как и любая реакция живого организма. Уровень потраченной энергии распределяется в диапазоне от нулевого, при эмпатичном (давление на жалость), минимального, при «питательном», и максимальном при «токсичном» для собеседника ответе. Это задает прямую заинтересованность бота «выбирать слова» при диалоге, смотря по тому, хочет ли он получить от собеседника порцию энергии или сбросить свою, и это задает общий, глобальный смысл всех реакций бота. Даже если собеседник никак не реагирует, просто наорать на него или в пустоту будет выгодно в случае избытка энергии бота, но даже просто разговаривать самому с собой уже не выгодно в случае пониженного уровня энергии. В этом случае самое энергетически выгодное молчать, а если собеседник все же реагирует, то просить. Такие безусловные реакции являются базовыми, от которых начинает строится дерево безусловных рефлексов бота. Процесс инициализации занимает конечное время. Сенсорная система бота воспринимая виртуальные объекты и связывая взаимодействие с ними с изменением своего гомеостаза формирует первичные сенсоры гомеостатической значимости, показывающие, какое влияние оказывает объект на бота, пока еще не связывая это с внешним контекстом условий. Это произойдет на следующем этапе построения дерева безусловных рефлексов, симуляторе эволюционного процесса. Но чтобы завершить этап инициализации у бота активируется соответствующий глобальный параметр. Затем я попытался представить развитие эволюционного процесса: Пищевой поисковый инстинктСтабилизация энергетического баланса бота изначально является пассивной формой адаптации, по аналогии с животным это простейшее адаптационное поведение типа уменьшить/увеличить обмен веществ, а все пищевое поведение сводится к поглощению проплывающего мимо корма, как у прикрепленных организмов типа губок, или фотосинтезу, как у растений. Но существенное преимущество получат те животные, которые перейдут к активному поиску корма. Это потребует более сложной адаптации, для которой нужен дополнительный рефлекс поведения: пищевой поисковый. Поэтому добавим новое ветвление в дерево рефлексов, продолжая имитировать эволюционный процесс: «губка» начала ползать, активно искать корм. Теперь это уже не прикрепленный организм, но еще и не полноценный хищник, так как кормовая база типа простейших микроорганизмов не требует особых навыков охоты, кроме их поиска и умения отличать съедобное от несъедобного. Оборонительный рефлексЖивые многоклеточные организмы первоначально адаптировались лишь к более эффективному пассивному усвоению корма, например фотосинтезу или поеданию простейших одноклеточных, пока не научились охотиться друг на друга, что послужило мощным толчком к усложнению нервной системы, так как требовало значительно более сложного реагирования для жертвы и хищника. Поэтому следующая эволюционная ступень адаптации – активные действия со стороны бота, которые отражаются в поле терминала в виде текста и являются его попыткой спровоцировать собеседника на генерацию нужных в данный момент боту текстовых фрагментов, с позиции их энергетической ценности и с учетом текущего контекста диалога. Это приводит к тому, что в простейшем варианте реагирования, находясь в зоне комфорта, бот может с одинаковой вероятностью провоцировать собеседника на любые варианты действий, а в зонах избытка/недостатка – только соответствующим нормализации баланса образом. Таким образом, основное внешнее проявление реакции бота «диалог» есть не что иное, как развитие оборонительного рефлекса, при котором бот выстраивает сложные активные стратегии стабилизации своего энергетического баланса. Это спарринг, при котором собеседники обмениваются «энергетическими ударами». Оборонительный рефлекс уже не привязан жестко к энергетической шкале, только как доминирующий по умолчанию, потому как требует мобилизации сил при любом состоянии. У животных оборонительный рефлекс бывает двух видов: активный, задающий ветвления злобы, мужества и т. д., и пассивный, задающий будущие ветвления трусости, отчаяния и т. п. Оба варианта доказали свою эффективность в ходе эволюции при соответствующих внешних контекстах. Это базовый инстинкт поведения «дерись или беги» из которого потом формируются множество вариаций через условные рефлексы. Можно сказать, что оборонительный рефлекс активируется по всей энергетической шкале в виде антагонистической пары, задающей диапазон реагирования от пассивного до активного противодействия, и в зоне перекрытия в средней части энергетической шкалы переходящий в интригу. При этом энергетическая шкала является лишь частью суммарного пускового стимула и запускает рефлексы лишь в случае отсутствия активности дополнительных уточняющих рецепторов. Смирение и агрессия могут проявиться в любой части шкалы, смотря по обстоятельствам, а интрига только в зоне комфорта Похоже это хоть в чем то на твой концепт или опять все не так? Если снова мимо, то скинь мне свое описание, начну вникать. По крайней мере, уже ясно видно затупы и интересно, как ты их обошел.
|



 Благодарность от:
Благодарность от: 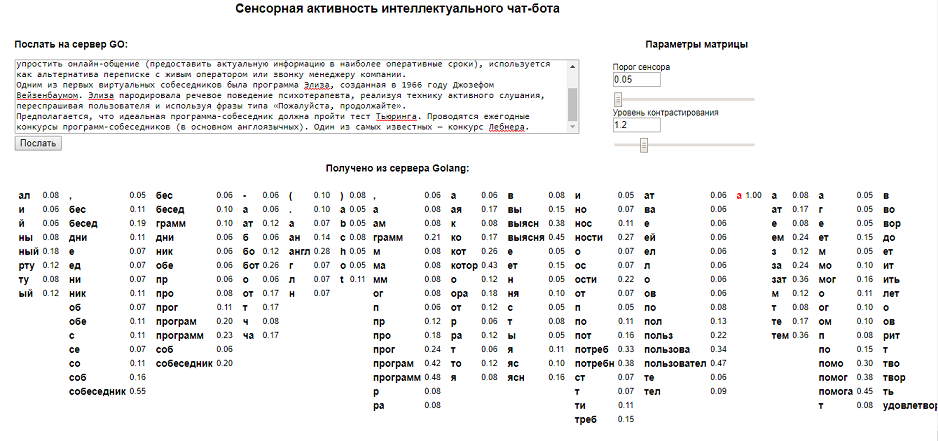


 редактор периодов развития
редактор периодов развития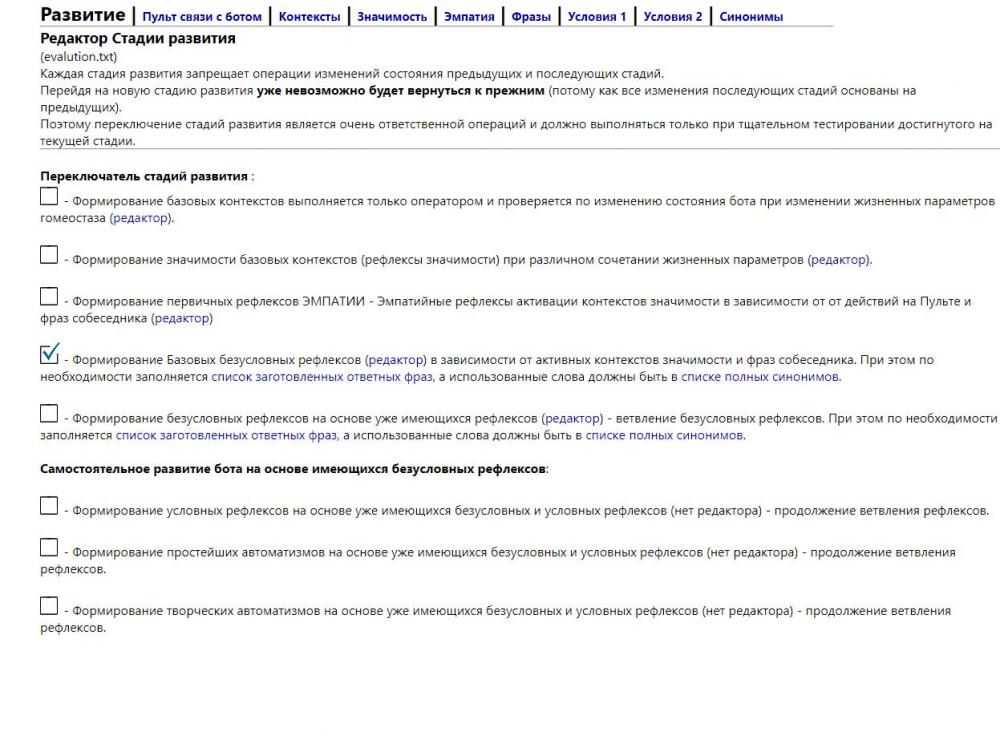

 . А что, если автор на досуге прочитал Форнит и решил на его базе запилить тренинг? :) Это ж гениально! В таком случае с удовольствием запишусь, как только накоплю нужную сумму
. А что, если автор на досуге прочитал Форнит и решил на его базе запилить тренинг? :) Это ж гениально! В таком случае с удовольствием запишусь, как только накоплю нужную сумму