Архитектура построения реактивного ядра автономного агента. Стадия 2
Относится к разделу Программная реализация системы индивидуальной адаптивности

Описание стадий:
Стадия 2: введение оценки динамики параметра для упреждающей регуляции
Цель второй стадии - повысить адаптивность базового ядра за счёт введения учёта динамики параметров, что позволяет системе опережать развитие угроз до достижения критического порога. На этой стадии вводится сигнал ΔPi — изменение параметра за такт, который используется как дополнительный регуляторный сигнал для упреждающей активации действий.
На стадии 2 добавляются:
- Сигнал динамики ΔPi = Pi(t) − Pi(t − 1)
- Порог значимости δ, определяющий минимальное изменение, учитываемое системой
- Механизм упреждающей активации в подпороговой области
- Параметр чувствительности ϵ, определяющий зону действия упреждения
Калибруются:
- Порог значимости δ — для фильтрации шума и малозначимых изменений
- Параметр ϵ — для настройки расстояния от порога Ti, в пределах которого учитывается динамика
Обоснование калибровки:
Значения δ и ϵ подбираются эмпирически или на основе анализа временных масштабов угроз в среде. Например, в среде с медленными угрозами δ может быть малым, а ϵ — большим, что обеспечивает раннее реагирование.
Функциональная роль в иерархии:
Сигнал ΔPi становится первым внутренним метасигналом, не связанным напрямую с активацией действий, но используемым для модуляции поведения. Он закладывает основу для оценки эффективности действий и предиктивного поведения на последующих стадиях.
Разработка стадии 2
На уровне реактивного ядра система реагирует только на факт отклонения параметра от нормы, что делает её уязвимой к быстрым и нарастающим угрозам. Для повышения адаптивности вводится оценка динамики параметра — изменение его значения за один такт системы:

с порогом значимости δ: если |∆Pi| < δ, изменение считается незначимым и не учитывается.
Этот сигнал используется для двух целей, реализуемых на разных уровнях архитектуры:
- На текущем уровне — для упреждающего усиления реакции
- На последующих уровнях — как основа для оценки эффективности действия в рамках адаптивных контуров действия
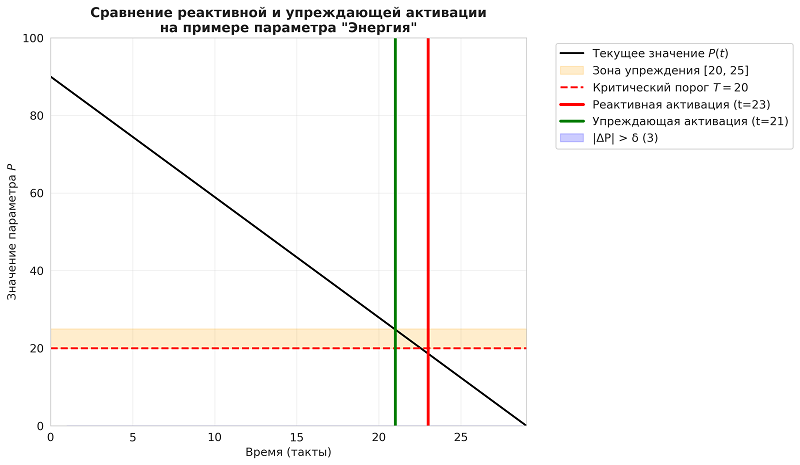
Рис.9. Сравнение реактивной и упреждающей активации действия. Упреждающая активация (зелёная) происходит в подпороговой области при условии устойчивого тренда, что позволяет выиграть время на компенсацию угрозы.
2.1. Улучшение адаптивности на уровне реактивного ядра
Механизм оценки динамики позволяет системе опережать развитие угрозы, даже если параметр ещё не вышел за критический порог. Для этого вводится условие упреждающей активации, которое срабатывает в подпороговой области, когда параметр Pi ещё находится в нормативной зоне, но демонстрирует устойчивую тенденцию к ухудшению.
Условие упреждающей активации:
- Pi находится в целевой области Ni, но близко к Ti (например, Pi < Ti + ϵ)
- ΔPi < − δ (для параметров дефицита) или ΔPi > + δ (для избытка)
- Тогда приоритет связанного действия временно повышается
Здесь вводится параметр ϵ — допустимое отклонение от порога, определяющее зону чувствительности для упреждающей активации:
![epsilon in [0,100], epsilon](/theory_publisher/art_pic/math_974_1055f5acab65d3ad64825bcb3fac2510.png "epsilon in [0,100], epsilon") << 100
<< 100
Он задаёт расстояние от Ti, в пределах которого начинает учитываться динамика параметра. Формально:
 + ϵ (для дефицита)
+ ϵ (для дефицита)
 - ϵ (для избытка)
- ϵ (для избытка)
Назначение ϵ :
- Ограничивает зону действия механизма упреждения, предотвращая ложные срабатывания при умеренных изменениях в середине нормативной области
- Позволяет настраивать чувствительность системы: чем меньше ϵ, тем ближе к порогу должна быть активация; чем больше — тем раньше система начнёт реагировать
- Обеспечивает робастность: исключает реакцию на динамику, когда параметр ещё далеко от угрозы
Пример:
- Параметр "Энергия": Ti = 20, ϵ = 5, δ = 3
- Тогда упреждающая активация возможна при Pi < 25 (т.е. в диапазоне от 20 до 25).
- Pi = 23 (в норме), но ΔPi = −4 (устойчивое падение)
- Условия выполняются: Pi < Ti + ϵ и ΔPi < −δ.
- Система повышает приоритет действия "поиск энергии", что может привести к его активации до достижения порога Ti = 20.
Преимущества:
- Снижается латентность реакции
- Агент начинает компенсировать угрозу на ранней стадии
- Поведение становится более устойчивым в условиях нестационарной среды
Важно:
этот механизм не заменяет пороговую активацию, а дополняет её. При пересечении Ti базовый контур обеспечивает надёжную реакцию, независимо от динамики. Упреждающая активация устойчива к небольшим временным лагам, что подтверждается в моделях когнитивного робота [2]. Однако при значительных задержках между действием и измерением ΔPi возможны ошибки оценки. В будущих версиях может быть введена буферизация состояний или оценка задержки, как в архитектурах с временным предсказанием [1].

Рис.10. Калибровка порога чувствительности δ. Слишком низкое значение (δ = 1) приводит к множественным ложным срабатываниям из-за шума. Оптимальное значение (δ = 3–5) обеспечивает баланс между ранним обнаружением угрозы и устойчивостью к помехам.
Финализация стадии 2
На данной стадии реализована упреждающая реакция на основе динамики, что снижает латентность и повышает устойчивость. Однако система по-прежнему не различает стабильность и улучшение, не может оценить, что действие уже работает, и не использует динамику как сигнал эффективности. Кроме того, отсутствует качественная интерпретация состояния системы. Эти задачи решаются на следующей стадии.
Список соответствий признанным подходам
Полные соответствия
- Принцип опережающего отражения. Введение сигнала ΔPi для реакции на тренд, а не только на свершившийся факт нарушения порога, напрямую соответствует кибернетическому принципу опережающего отражения, сформулированному П.К. Анохиным, и концепциям предиктивного управления (predictive control) в технических системах.
- Иерархическая организация управления. Предложенная архитектура, где базовое реактивное ядро дополняется более высокоуровневыми модулями (оценка динамики, а в перспективе — оценка эффективности), соответствует устоявшимся парадигмам в робототехнике (например, субсумтивная архитектура) и нейронауках (модель трёхзвенной структуры мозга по МакЛину).
- Адаптация к временным масштабам угроз. Упоминание о настройке параметров δ и ε в зависимости от скорости изменений в среде (медленные/быстрые угрозы) полностью согласуется с биологическими механизмами аллостаза и теорией адаптивного поведения, где система подстраивает стратегии под динамику среды.
- Фильтрация шума. Введение порога значимости δ для отсечения незначительных колебаний параметра является стандартной и необходимой практикой в обработке сигналов и разработке надежных систем управления, имитирующей механизмы шумоподавления в биологических сенсорных системах.
Неполное / Частичное соответствие
- Проблема временных задержек. При значительных задержках между действием и измерением возможны ошибки, и предлагается буферизация состояний как решение в будущем. Это частично соответствует признанной проблеме "credit assignment problem" в ИИ и робототехнике, но предлагаемое решение является общим и не конкретизированным.
Прямые несоответствия / Критика
- Отсутствие биологической аналогии для параметра ε. В то время как порог δ имеет четкие аналогии в биологии (пороги возбуждения нейронов), параметр ε (зона чувствительности) представляется сугубо техническим решением. В биологических системах чувствительность часто изменяется динамически (например, сенситизация или привыкание), а не задается фиксированным значением. Жесткий параметр ε может быть недостаточно гибким в сложных средах.
- Ограниченность одномерной динамики. Подход оперирует изменением одного параметра за такт (ΔPi). В реальных биологических и робототехнических системах угрозы часто являются многомерными, и их прогноз требует анализа корреляций между несколькими параметрами, что в рамках описанной стадии не предусмотрено.
Итоговое обобщение и оценка перспективности
- Соответствие научным представлениям: Предложенный механизм стадии 2 в высокой степени соответствует современным научным представлениям о построении адаптивных систем. Его основная сила — в элегантном и вычислительно эффективном расширении классической реактивной схемы, что биологически правдоподобно и технически реализуемо.
- Перспективность: Подход крайне перспективен для разработки автономных агентов, функционирующих в детерминированных или слабо-стохастических средах с четкими параметрами состояния (уровень энергии, температура, заряд батареи). Его перспективность заключается в простоте, обеспечивающей надежность, и в заделе на дальнейшее развитие (оценка эффективности, предикция).
Потенциальные трудности и препятствия при реализации
- Калибровка параметров (δ, ε): Настройка этих параметров, как указано, требует эмпирического подхода или анализа временных масштабов. В нестационарной или плохо предсказуемой среде это может привести к необходимости сложной адаптации самих порогов, что усложняет систему.
- Риск ложных срабатываний: Даже с порогом δ, система может интерпретировать кратковременные флуктуации среды как устойчивый тренд, что приведет к неоптимальному поведению и перерасходу ресурсов агента.
- Масштабируемость на многомерные угрозы: Главное ограничение — сложность переноса подхода на ситуации, где угроза определяется комбинацией параметров (напр., "голод" + "наличие хищника"). Потребуются более сложные механизмы для оценки динамики многомерного состояния.
- Интеграция с системами планирования: Для полноценной автономии упреждающие сигналы должны не просто повышать приоритет действия, но и интегрироваться в планирование последовательностей действий.
Список литературы:
- Franklin, S., & Patterson, F. G. (2006). The LIDA model: computational consciousness. Proceedings of the 6th International Conference on Cognitive Modeling.
- Tani, J. (2016). Exploring cognitive developmental robotics. MIT Press.
Список произведений >>
Список публикаций >>
Оценить статью можно после того, как в обсуждении будет хотя бы одно сообщение.
Тест: А не зомбируют ли меня? Тест: Определение веса ненаучности
| Обнаружен организм с крупнейшим геномом Новокаледонский вид вилочного папоротника Tmesipteris oblanceolata, произрастающий в Новой Каледонии, имеет геном размером 160,45 гигапары, что более чем в 50 раз превышает размер генома человека. | Тематическая статья: О вере в полеты американцев на Луну |
Рецензия: Комментарии теории К. Фристона «Предсказательное кодирование и Принцип свободной энергии» | Топик ТК: Физическая суть глобальной информационной картины |