Архитектура построения реактивного ядра автономного агента. Стадия 1
Относится к разделу Программная реализация системы индивидуальной адаптивности

Введение
Создание автономных агентов, способных к устойчивому функционированию в изменяющейся и неструктурированной среде, требует решения задачи адаптивного поведения. Традиционные подходы в области искусственного интеллекта и робототехники часто полагаются на сложные архитектуры, включающие внутренние модели мира, цели, память и обучение, что делает их трудно интерпретируемыми и хрупкими в условиях неопределённости. Ключевая проблема таких систем заключается не в наличии этих компонентов, а в их преждевременном введении на уровне базовой архитектуры. Попытка реализовать когнитивную сложность с самого начала приводит к системам, которые оказываются неустойчивыми при частичной информации или неспособными к поэтапному наращиванию поведенческих возможностей.
В данной работе предлагается альтернативный подход к построению адаптивных систем, основанный на проектировании модульного реактивного ядра, которое служит надёжной основой для последующего функционального расширения. В отличие от стратегии имитации сложного поведения на начальном этапе, мы формализуем минимально необходимый уровень поддержания функциональной целостности агента, обладающий свойствами модульности, прозрачности и расширяемости. Цель не в том, чтобы создать агента без моделей мира или памяти, а в том, чтобы определить правильный порядок интеграции этих компонентов, при котором каждый последующий уровень опирается на устойчивую работу предыдущего.
ISIDA (Incremental System for Intelligent Development of Agents)
Архитектура системы ISIDA представлена в виде иерархии функциональных уровней, каждый из которых вводит новое качество адаптивности, используя механизмы предыдущего уровня. Подход перекликается с идеями субсумционной архитектуры (Brooks, 1986) [2], где сложное поведение строится из простых слоёв, и с иерархическими когнитивными архитектурами (SOAR [6, ACT-R [7]), где поведение формируется поэтапно, от реактивного к планирующему. Однако, в отличие от них, ISIDA фокусируется на функциональной основе поведения, что делает её более пригодной для автономных агентов в условиях физической угрозы. Теоретической основой для проектирования архитектуры служат принципы иерархической регуляции (Brooks, 1986), реактивного управления и концепция функциональной устойчивости в автономных системах (Pfeifer & Bongard, 2006).
Каждый из функциональных уровней решает конкретную инженерную задачу, преодолевая ограничения предыдущего, и сохраняет работоспособность всей системы на каждом этапе. Особенностью подхода является сочетание структурной иерархии ядра с потенциалом для постадийного обучения, при котором приобретение поведенческих стратегий соответствует уровням иерархии. Таким образом, работа демонстрирует воспроизводимый путь к усложнению архитектуры, при котором когнитивные функции (такие как прогнозирование, память, обучение) добавляются не на начальном этапе, а по мере необходимости и на основе уже отлаженных механизмов.
Предлагаемая архитектура следует принципам реактивного регулирования, где поведение инициируется отклонением критических параметров от нормы. В отличие от прогностических архитектур, которые используют внутренние модели для предсказания угроз, ISIDA не включает механизм прогнозирования на уровне ядра. Это позволяет сохранить прозрачность и устойчивость, откладывая реализацию предиктивного поведения на более высокие уровни системы, что соответствует принципу поэтапного усложнения.
Необходимость ввода новой терминологии
Нейробиология и инженерия автономных систем изучают одни и те же феномены — автоматическое реагирование, ассоциативное обучение, адаптацию к среде — но используют принципиально разные языки. Биологи оперируют терминами «рефлекс», «условный рефлекс», «оперантное обучение», привязывая их к анатомическим структурам (спинной мозг, миндалевидное тело, дофаминергические пути) [1]. Инженеры ИИ используют термины «реактивный агент», «классическое обучение», «RL-агент», определяя их через алгоритмы (поведенческие деревья, модели Рескорлы–Вагнера, Q-обучение) [2]. Эти системы имеют сходную функциональность, но отсутствие общего языка делает их взаимопонимание невозможным.
Такое разобщение имеет серьёзные последствия. С одной стороны, нейробиология не может использовать мощные вычислительные модели ИИ для интерпретации данных фМРТ и электроэнцефалографии. С другой — ИИ не может воспользоваться эволюционно оптимизированными механизмами биологического обучения в начальных стадиях развития, которые работают с минимальными ресурсами, без эпизодической памяти и с высокой устойчивостью к шуму. Это особенно критично для разработки автономных систем, способных к быстрому, энергоэффективному и надёжному обучению в изменяющейся среде.
Современные архитектуры ИИ, такие как Deep Q-Networks (DQN) или Proximal Policy Optimization (PPO), требуют миллиардов шагов для обучения простым задачам [3]. Они полагаются на внешнюю награду, которая не существует в естественной среде. Биологические системы, напротив, используют внутренние сигналы, такие как изменения уровня глюкозы, pH, температуры тела или гомеостатического дисбаланса — сигналы, которые могут быть формализованы как ΔPᵢ (изменение критического параметра) [4].
Более того, биологические системы способны к обучению за один пример — например, новорожденный младенец повторяет движение руки, увиденное один раз, через 24 часа [5]. Такое поведение невозможно в современных RL-системах без имитационного обучения, которое само по себе требует большого количества демонстраций.
Поэтому возникла необходимость представить строго формализованную, эмпирически обоснованную и междисциплинарно применимую модель поведения, объединяющую ключевые концепции из нейробиологии и ИИ в единую терминологическую и функциональную систему. При этом не предлагается новых экспериментальных данных, а синтезируются существующие факты в логически согласованную структуру, пригодную для анализа и реализации в обоих доменах.
Описание стадий:
Стадия 1: реактивное ядро с пороговым управлением
На этой стадии происходит построение минимально необходимого уровня самоподдержания, обеспечивающего функциональную целостность агента в условиях внешних и внутренних угроз, формируется базовое реактивное ядро, в котором поведение агента определяется исключительно текущим состоянием параметров самоподдержания. Ядро проектируется как модульная, детерминированная система с жёсткими правилами активации, не требующая памяти, прогнозирования или обучения.
На стадии 1 собираются следующие компоненты:
- Вектор базовых параметров
") каждый из которых нормализован к диапазону [0,100]
каждый из которых нормализован к диапазону [0,100] - Пороговая активация адаптивных действий при пересечении критического порога Ti
- Функция потребности Ui для приоритизации компенсаторных действий
- Принцип композиции элементарных контуров — механизм декомпозиции много-пороговых параметров на набор независимых одно-пороговых регуляторов
Калибруются следующие параметры:
- Критические пороги Ti для каждого параметра
- Нормативные границы Ni (верхняя для дефицита, нижняя для избытка)
- Тип угрозы (дефицит или избыток)
- Топология и величины модулирующих сдвигов ∆ij между параметрами
- Для многопороговых параметров: набор порогов
 и соответствующих групп действий
и соответствующих групп действий 
Обоснование калибровки:
Параметры Ti и Ni устанавливаются на основе физических ограничений системы (например, минимальный заряд батареи, предельная температура). Величины ∆ij задаются экспертно или по аналогии с известными системами и могут быть оптимизированы в последующих этапах. Для параметров, требующих поддержания в диапазоне (например, температура), вводится не один, а два (или более) элементарных контура — по одному на каждую границу диапазона. Это обеспечивает семантическую чёткость: каждое действие активируется только при конкретном типе отклонения (дефицит/избыток) и направлено на его устранение.
Функциональная роль в иерархии:
Базовое ядро служит источником стабильных, интерпретируемых сигналов (значения Pi, ∆Pi, Ui) для всех последующих уровней. Кроме этого, оно обеспечивает механизм отката — при потере информации или неопределённости система может полагаться на его реактивные реакции. Принцип композиции элементарных контуров обеспечивает модульность и масштабируемость: сложные регуляторные задачи сводятся к комбинации простых, независимых и верифицируемых компонентов.
Разработка стадии 1
1.1. Элементарные контуры самоподдержания
Основа реактивного ядра агента – система взаимосвязанных базовых параметров, которую можно представить как вектор скалярных величин:
")
Каждый параметр Pi представляет из себя элементарный базовый регулятор и моделирует критически важный аспект функциональной целостности агента (например, энергия, целостность, температура).
Все параметры нормализованы к единому диапазону:
![P_i[0,100]](/theory_publisher/art_pic/math_977_64df616c6f8d9c56f42143561653a03e.png "P_i[0,100]")
где 0 соответствует минимальному, а 100 — максимальному допустимому значению в физической системе.
Нормализация подразумевает, что разные типы выделенных в системе параметров фактически могут иметь какие угодно фиксированные диапазоны значений в любых единицах, например температура от -50 до +1500 градусов, но при этом система воспринимает их как значения в диапазоне от 0 до 100.
Для каждого параметра задается Критический порог Ti и определяется тип параметра, в зависимости от направления критического отклонения:
- Дефицит-ориентированные параметры: критическое отклонение возникает при значении ниже порога (Pi < Ti). Пример: энергия, заряд, здоровье.
- Избыток-ориентированные параметры: критическое отклонение возникает при значении выше порога (Pi > Ti). Пример: стресс, температура, повреждение.
Каждый параметр имеет определенный нормализованный вес значимости Wi, который может быть выведен из физической критичности (например, время до фатального отказа при текущем тренде) или экспертной оценки. При этом:
![W_i in [0,1]](/theory_publisher/art_pic/math_974_81a4aa92ce55d4c95594bd1facc12660.png "W_i in [0,1]")
Это различие определяет формулу функции потребности Ui, которая вычисляется как нормализованное отклонение от порога в сторону критической зоны:
Для дефицит-ориентированных параметров:

/T_i")

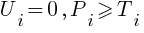
Для избыток-ориентированных параметров:
/(100-T_i)")


Отклонение базового параметра от нормы интерпретируется как функциональная дисрегуляция — состояние, требующее компенсации для поддержания целостности агента. Сенсоры измеряют текущее значение параметра Pi с заданной частотой, и при пересечении критического порога Ti активируется соответствующее компенсаторное действие Ai, или группа действий Gi. Приоритет активации определяется функцией потребности Ui, значение которой рассчитывается в зависимости от типа отклонения (дефицит или избыток) и служит мерой срочности вмешательства; действие с наибольшим значением Ui получает наивысший приоритет. Приоритет пересчитывается на каждом такте работы системы, что позволяет динамически учитывать как появление новых отклонений, так и изменение степени дисрегуляции уже активных контуров, обеспечивая адаптивный и своевременный отклик на текущее состояние агента.
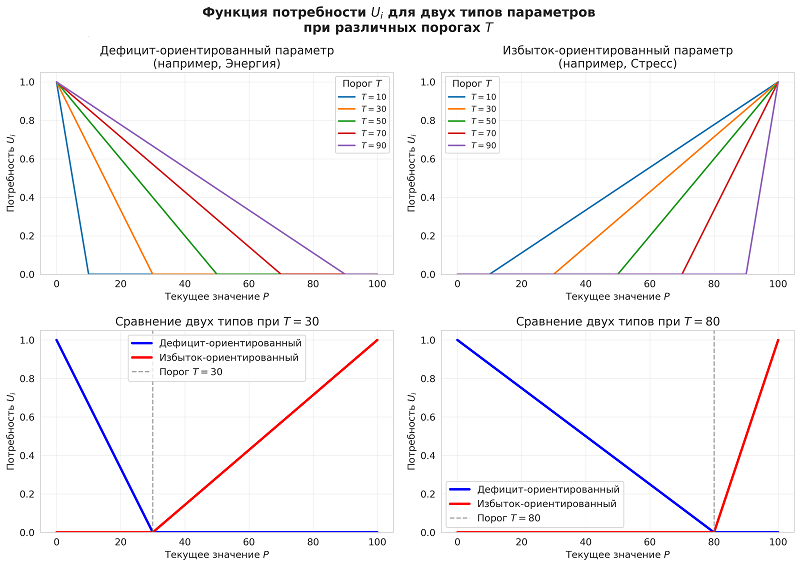
Рис. 1. Зависимость функции потребности Ui от текущего значения параметра P при различных порогах T. Слева — дефицит-ориентированный параметр (например, энергия), справа — избыток-ориентированный (например, стресс).
1.2. Принцип композиции элементарных контуров
Сложный много-пороговый параметр Pi может быть представлен как композиция нескольких элементарных регуляторов, если он требует поддержания в значений в диапазоне. Например, параметр «Температура» декомпозируется на два контура:
- Регулятор дефицита (переохлаждение): активируется при
 , компенсаторное действие — «Нагрев»
, компенсаторное действие — «Нагрев» - Регулятор избытка (перегрев): активируется при
 , компенсаторное действие — «Охлаждение»
, компенсаторное действие — «Охлаждение»
Каждый элементарный регулятор при этом функционирует автономно и характеризуется:
- Собственным порогом Ti
- Собственной группой действий Gi
- Собственной функцией потребности Ui
Такой подход исключает смешение логики обработки качественно различных отклонений и позволяет проводить независимую валидацию для каждого контура.
Рис.2. Декомпозиция многопорогового параметра «Температура» на два элементарных контура: дефицит-ориентированный (активируется при низких значениях) и избыток-ориентированный (активируется при высоких значениях). Нормативная зона выделена зелёным. Функции потребности активируются только за пределами соответствующих порогов и нормализованы к [0,1].
1.3. Принцип конкурентной активации для много-пороговых параметров
Много-пороговый параметр декомпозируется на набор независимых элементарных одно-пороговых регуляторов. Каждый из них:
- Рассчитывает свою функцию потребности Ui относительно своего порога Ti и своего типа угрозы (дефицит/избыток)
- Участвует в глобальном конкурентном выборе на каждом такте работы системы
- Побеждает контур с максимальным значением Ui, что соответствует параметру (или граничному условию) с наибольшей функциональной дисрегуляцией
Такой подход позволяет естественным образом интегрировать динамику параметра (через механизм упреждающей активации, Стадия 2) и качественную оценку состояния (Стадия 3), не внося противоречий в архитектуру. Движение параметра к одному порогу автоматически снижает Ui для противоположного контура, обеспечивая семантически согласованное поведение.
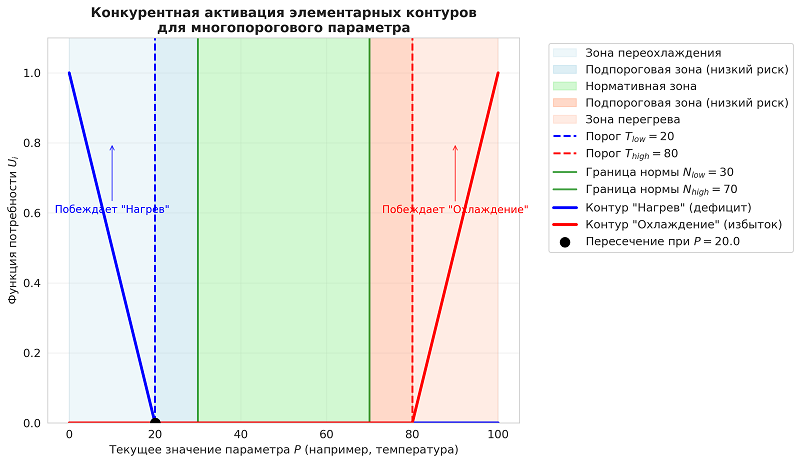
Рис.3. Конкурентная активация двух элементарных контуров параметра «Температура»: «Нагрев» (при P < 20) и «Охлаждение» (при P > 80). На каждом такте побеждает контур с максимальной функцией потребности Ui. Точка пересечения кривых показывает переход приоритета. Нормативная зона выделена зелёным.
1.4. Механизм динамической модуляции
Базовыеы параметры Pi не являются изолированными, они объединены в сеть функциональной взаимозависимости, моделирующую косвенное влияние изменений одного параметра на значения других. Эта связь реализуется через механизм динамической модуляции, при котором тенденция изменения параметра (отрицательный или положительный тренд) вызывает смещение значений других связанных параметров на фиксированную величину Δ.
Для каждого параметра Pi определены:
- Множество параметров-мишеней, на которые он оказывает влияние
- Направление модуляции (прирост или убыль) для каждого из них
- Величина модулирующего сдвига ∆ij, где i — источник влияния, j — цель
Модуляция активируется на каждом такте, если параметр Pi находится в состоянии «Критическое отклонение» или «Позитивный тренд» (см. стадия 3).
При отрицательном тренде ∆Pi < 0 для параметров дефицита, или ∆Pi > 0 для параметров избытка значение каждого связанного параметра Pj изменяется как:

При положительном тренде (∆Pi направлен к норме) изменение происходит как:
 +
+ 
Значения  , а также топология связей задаются на этапе калибровки архитектуры и могут быть как положительными, так и отрицательными, включая нулевые (отсутствие связи).
, а также топология связей задаются на этапе калибровки архитектуры и могут быть как положительными, так и отрицательными, включая нулевые (отсутствие связи).
Пример:
При активации «потери целостности» (например, повреждение корпуса) может быть задана модуляция энергии:

Это означает, что каждое обнаруженное ухудшение целостности приводит к дополнительному расходу энергии, имитируя процессы саморемонта или стресс-реакции.
Цель механизма: повысить системную целостность модели за счёт отражения вторичных эффектов нарушений — например, энергетических затрат на терморегуляцию при повреждении, или снижения подвижности при истощении. Это позволяет избежать ситуаций, когда агент "исправляет" один параметр, не осознавая, что это усугубляет другой.
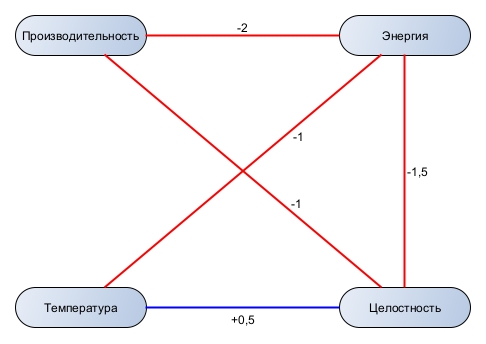
Рис.4. Сеть динамической модуляции между параметрами самоподдержания. Стрелки показывают направление влияния, цвет — тип (красный: потребление, синий: прирост), цифры — величина сдвига Δij.
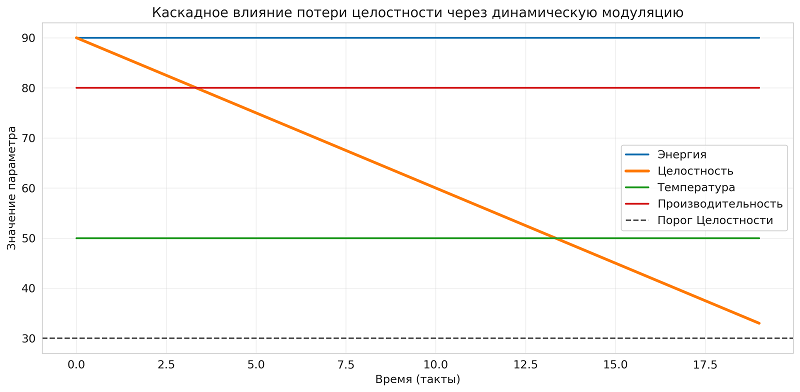
Рис.5. Каскадное влияние нарушения "Целостности" на другие параметры через механизм динамической модуляции. Без учёта этих связей агент может недооценивать последствия своих действий.
1.5. Компенсаторные действия: формализация и свойства
Каждое компенсаторное действие Ai, активируемое при нарушении порога Ti параметра Pi, представляет собой детерминированную операцию, направленную на изменение состояния агента. Действия реализуются без использования памяти, прогнозирования или обучения и исполняются мгновенно в пределах одного такта системы.
Каждое компенсаторное действие A_i, активируемое при нарушении порога T_i параметра P_i, представляет собой детерминированную операцию, направленную на изменение состояния агента. Действия реализуются без использования памяти, прогнозирования или обучения и исполняются мгновенно в пределах одного такта системы.
Каждое действие Ai формально описывается двумя компонентами:
- Влияние (Impact) — вектор
") , где
, где  — изменение параметра
— изменение параметра  , целевое для действия (например, повышение температуры, восстановление целостности).
, целевое для действия (например, повышение температуры, восстановление целостности). - Затраты (Cost) — вектор
") , где
, где  — ресурсные издержки действия по параметру (например, потребление энергии, снижение производительности).
— ресурсные издержки действия по параметру (например, потребление энергии, снижение производительности).
На этапе исполнения действие приводит к чистому эффекту  , применяемому к вектору состояния:
, применяемому к вектору состояния:
 +
+ ")
Каждому базовому параметру Pi сопоставляется строго определённая группа действий  , активируемых исключительно при нарушении его порога Ti. Эта группа формируется и валидируется на этапе калибровки архитектуры и не изменяется в runtime.
, активируемых исключительно при нарушении его порога Ti. Эта группа формируется и валидируется на этапе калибровки архитектуры и не изменяется в runtime.
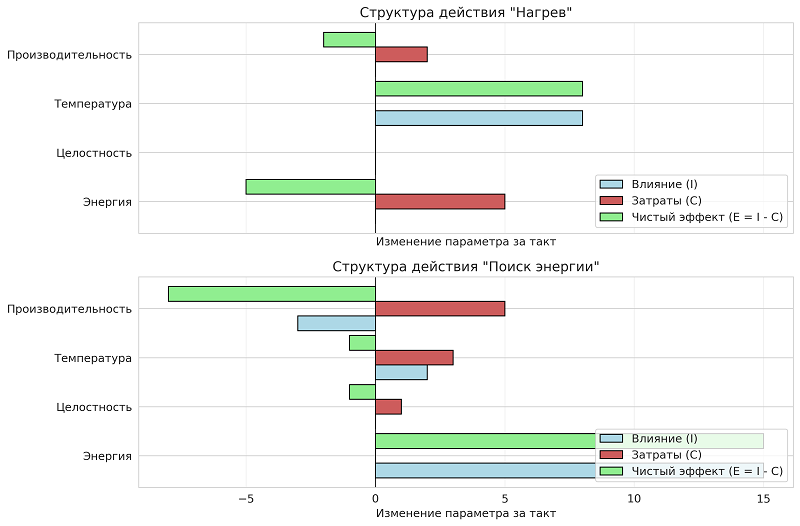
Рис.6. Структура компенсаторных действий «Нагрев» и «Поиск энергии». Показаны векторы влияния (I), затрат (C) и чистого эффекта (E = I − C) по всем параметрам. Положительные значения — улучшение, отрицательные — ухудшение. Чистый эффект определяет итоговое изменение состояния агента.
1.6. Валидация на этапе калибровки:
- Эффективность на активирующем параметре: Для любого действия
 выполняется
выполняется  — чистый эффект на параметре Pi, инициировавшем активацию, должен быть положительным.
— чистый эффект на параметре Pi, инициировавшем активацию, должен быть положительным. - Физическая осуществимость: Для всех k и всех допустимых Pk ∈ [0, 100] выполняется условие Pk + (Iik − Cik) ∈ [0, 100]. Допускается смягчение до условия: применение действия не вызывает немедленного критического отклонения по любому параметру.
- Совместимость внутри группы: Для всех пар действий Ai, Aj ∈ Gi и для всех k, суммарное влияние (Iik − Cik) + (Ijk − Cjk) не создаёт логического противоречия.
- Ограничение побочных затрат: Для любого действия Ai ∈ Gi и для любого параметра Pk (k ≠ i) выполняется Cik ≤ Lk, где Lk — максимально допустимая величина затрат по параметру Pk, заданная на этапе калибровки.
- Баланс влияния и затрат: Для любого действия Ai ∈ Gi и для любого параметра Pk выполняется Iik ≥ Cik, если k = i (нельзя “тратить больше, чем получаешь” на целевом параметре). Для k ≠ i — допускается Iik < Cik, но с ограничением по п.4.
- Проверка коммутативности: для всех пар действий Ai, Aₖ ∈ Gi проверяется, что для всех параметров Pi:
- (Iⱼi − Cⱼi) + (Iₖi − Cₖi) = (Iₖi − Cₖi) + (Iⱼi − Cⱼi)
Если равенство нарушается хотя бы для одного параметра — порядок применения фиксируется на этапе калибровки.
Таким образом, на этапе исполнения система применяет только предварительно верифицированные действия, гарантирующие чистое улучшение активирующего параметра и контролируемое воздействие на остальные.
В ходе имитационного анализа было протестировано 10 000 случайных действий, моделирующих возможные стратегии регуляции. Только 64 (0,6%) из них прошли полную валидацию по всем критериям, что подтверждает высокую избирательность механизма. Наиболее строгими оказались критерии физической осуществимости и баланса влияния/затрат. Это гарантирует, что на этапе исполнения используются исключительно безопасные и эффективные действия.
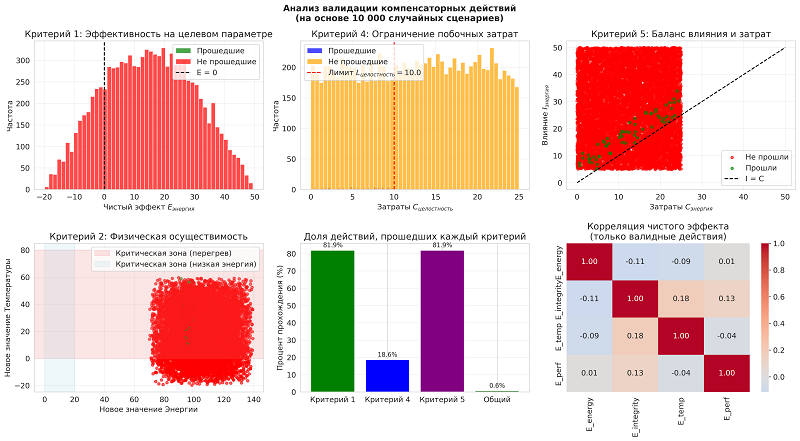
Рис.7. Результаты валидации 10 000 случайных компенсаторных действий по шести критериям. Показаны распределения ключевых метрик, доля прохождения и корреляция чистых эффектов для валидных действий.
1.7. Валидация топологии связей между параметрами на цикличность
После установки величин и знаков модулирующих сдвигов Δij проводится анализ топологии сети влияний на наличие ориентированных циклов. Для этого строится направленный граф G(V, E), где вершины V соответствуют параметрам Pi, а дуга ei → j существует, если Δij ≠ 0. Для обнаружения циклов применяется стандартный алгоритм поиска в глубину (DFS) с классификацией рёбер. Найденные циклы классифицируются по знаку результирующего воздействия: цикл считается положительным, если произведение знаков Δij по всем его дугам положительно, и отрицательным — в противном случае.
Наличие в системе положительных ориентированных циклов создаёт условия для возникновения неустойчивых режимов работы, характеризующихся неограниченным ростом или падением значений вовлечённых параметров, и поэтому недопустимо. При обнаружении таких контуров требуется коррекция топологии связей: обнуление одного или нескольких коэффициентов Δij, входящих в цикл, либо изменение их знака для преобразования контура в отрицательный. Отрицательные циклы, напротив, могут выполнять стабилизирующую функцию и не являются объектом исключения на данном этапе.
Перед проведением анализа топологии на ацикличность выполняется проверка корректности исходного графа влияний G(V, E). Данная проверка включает два обязательных условия:
- Запрет петель (self-loops): Для любой дуги ei → j должно выполняться условие i ≠ j. Установка связи параметра на самого себя (Δii ≠ 0) лишена семантического смысла в данной модели и приводит к математической некорректности, так как искажает независимое воздействие тренда параметра на самого себя
- Корректность индексов: Для любой дуги ei → j индексы i и j должны принадлежать множеству индексов параметров [1, n], где n — размерность вектора состояния P. Наличие связи ei → k, где k > n, указывает на ошибку в конфигурации
Граф, не удовлетворяющий данным условиям, считается некорректным, и его анализ не проводится до устранения указанных нарушений. Данная процедура валидации является необходимым условием обеспечения устойчивости базового реактивного ядра.
1.8. Ограничения на количество и качество действий: однотактность как фундаментальное требование
Реактивное ядро, как определено в стадии 1, оперирует исключительно однотактовыми действиями — операциями, чей эффект мгновенно (в пределах одного такта) отражается на векторе состояния агента. Это требование вытекает из отсутствия памяти, прогнозирования и внутреннего представления о времени — архитектура реагирует только на текущее сенсорное состояние [2]. Такое ограничение накладывает жёсткие рамки на тип, сложность и количество допустимых действий, поскольку любое действие, требующее последовательности шагов, временной задержки или контекстной адаптации, не может быть корректно представлено в виде вектора чистого эффекта E = I − C.
Проблемы, вызванные однотактностью:
- Невозможность реализации составных или условных действий.
Например, действие «зарядиться» требует: (а) обнаружения станции, (б) навигации к ней, (в) физического подключения, (г) ожидания заряда, (д) отключения. Ни один из этих шагов не может быть сведён к мгновенному изменению параметров без введения памяти, оценки прогресса или планирования — что противоречит принципам стадии 1. - Отсутствие обратной связи во времени.
Действие не может адаптироваться в процессе выполнения, так как нет механизма отслеживания промежуточного состояния. Например, если «охлаждение» требует 5 тактов для снижения температуры, но на 3-м такте параметр «энергия» падает ниже критического — система не может прервать действие, так как не хранит информацию о его «текущем выполнении». - Комбинаторный взрыв при масштабировании.
Каждое действие должно быть верифицировано по всем параметрам на всех возможных состояниях (см. раздел 1.6). При увеличении числа параметров n > 15 , число потенциально конфликтующих взаимодействий растёт экспоненциально, что делает ручную или даже автоматическую валидацию непрактичной без модульной декомпозиции [2].
Примеры допустимых действий
Для виртуального агента (например, в симуляции жизнеспособности):
- Восполнить_энергию_на_5 — мгновенное увеличение P_энергия на +5, затраты: P_ресурс −1
- Снизить_нагрузку — уменьшение P_стресс на -3, затраты: P_производительность −2
- Активировать_защиту — увеличение P_целостность на +4, затраты: P_энергия −3
Для физического робота:
- Включить_вентилятор — влияет на P_температура (снижение), затраты: P_энергия (расход).
- Отскок_назад — влияет на P_целостность (предотвращение столкновения), затраты: P_позиция (потеря продвижения).
- Переключиться_на_резерв — влияет на P_энергия , затраты: P_износ
Из биологии (рефлекторные реакции без участия высших центров):
- У C. elegans: действие отскок_от_прикосновения — мгновенный реверс движения при механическом стимуле, опосредован одиночным сенсомоторным контуром [1, гл. 48].
- У млекопитающих: миоз (сужение зрачка при ярком свете) — рефлекторная реакция, управляемая подкорковыми структурами, без участия коры [1, гл. 28].
- У растений: закрытие_устьиц при снижении тургора — однотактовый ответ на осмотический стресс, реализуемый через ионные каналы в клетках устьиц [1, гл. 62].
Эти примеры подчёркивают: реактивное ядро на 1 стадии компоновки эффективно только для рефлекторных, физиологических или моторных реакций, которые могут быть сведены к мгновенному сдвигу в пространстве состояний. Любое действие, требующее временной протяжённости, памяти или адаптации — выходит за рамки данной стадии и должно быть реализовано на последующих уровнях иерархии через механизмы планирования, прогнозирования или обучения.
1.9. Цикл работы реактивного ядра:
Работа реактивного ядра осуществляется в дискретных тактах. На каждом такте выполняется следующая последовательность операций:
- Сенсорная информация: измеряются текущие значения всех базовых параметров Pi.
- Обнаружение отклонения: для каждого параметра Pi с учетом его типа проверяется условие выхода за порог Ti:
- Дефицит-ориентированные: Pi < Ti
- Избыток-ориентированные: Pi > Ti - Вычисление функции потребности Ui для всех параметров с нарушенными порогами
- Выбор приоритетного параметра: определяется параметр P* с максимальным значением Ui с учетом веса Wi. Если таких несколько — выбирается произвольно (или по фиксированному правилу, заданному на этапе калибровки).
- Активация группы действий G*: запускается предопределённая группа действий, сопоставленная параметру P*. Группа была верифицирована на этапе калибровки и не содержит внутренних конфликтов или недопустимых затрат.
- Применение действий: для каждого действия Ai ∈ G* вычисляется и применяется чистый эффект Ei = Ii − Ci:
Pk ← Pk + (Iik − Cik) для всех k ∈ [1, n] - — Дополнительные runtime-проверки не требуются, так как все ограничения (физическая осуществимость, баланс влияния/затрат, совместимость) были обеспечены на этапе калибровки.
- Обратная связь: зафиксированные изменения параметров используются как входные данные на следующем такте.
Примечание:
порядок применения действий внутри группы может быть задан на этапе калибровки, если их влияния не коммутативны (например, сначала снижение нагрузки, затем активация охлаждения). В противном случае — порядок не влияет на результат.
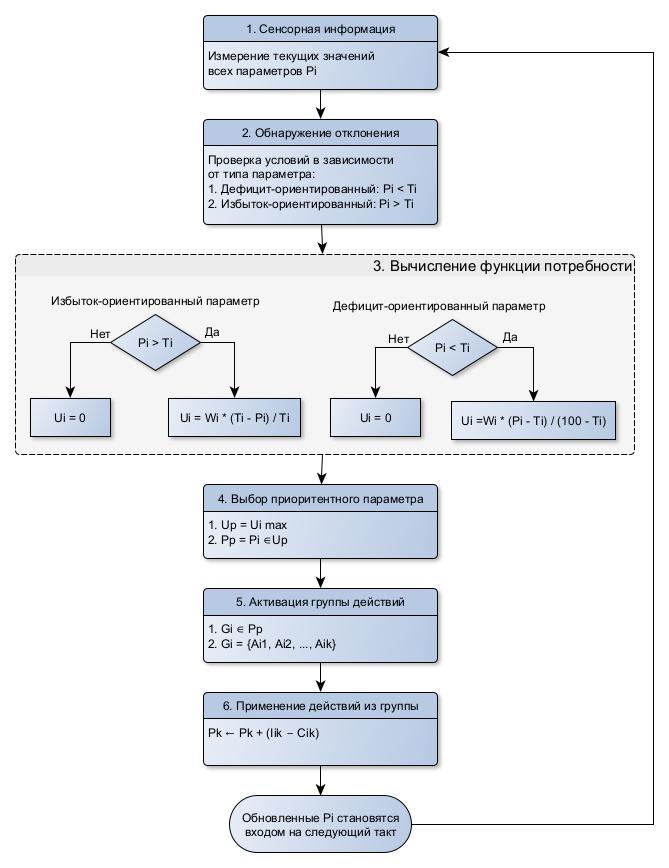
Рис.8. Цикл работы реактивного ядра ISIDA на 1 стадии сборки. На каждом такте система последовательно измеряет состояние, определяет приоритетное отклонение, активирует соответствующую группу действий и применяет их чистый эффект. Процесс повторяется в цикле, обеспечивая устойчивое само-поддержание. Обратная связь замыкает цикл.
Финализация стадии 1
На данной стадии реализована детерминированная реактивная архитектура, обеспечивающая базовую функциональную целостность агента в условиях отклонений базовых параметров. Ядро функционирует без использования памяти, прогнозирования или обучения, полагаясь исключительно на текущее состояние системы и предварительно валидированные правила активации.
Ключевым расширением является введение принципа композиции базовых параметров, позволяющего естественным образом моделировать параметры, требующие поддержания в диапазоне. Каждый такой параметр декомпозируется на набор независимых однопороговых контуров, что обеспечивает:
- Модульность: каждый параметр проектируется, тестируется и валидируется независимо
- Масштабируемость: сложное поведение возникает из взаимодействия простых компонентов
- Инженерную гибкость: новые режимы регуляции добавляются путём введения новых параметров, без изменения существующих
Каждому базовому параметру сопоставлена группа действий Gᵢ, формально описываемая через векторы влияния Iᵢ и затрат  , и сводимая в runtime к чистому эффекту
, и сводимая в runtime к чистому эффекту  Все действия прошли верификацию на этапе калибровки по расширенному набору критериев, включая валидацию взаимной исключающей активации и целостности диапазона.
Все действия прошли верификацию на этапе калибровки по расширенному набору критериев, включая валидацию взаимной исключающей активации и целостности диапазона.
Архитектура не стремится к глобальной оптимизации состояния агента. Вместо этого, на каждом такте стабилизируется единственный параметр (или один регулятор одного много-порогового параметра) с максимальной функцией потребности  , что может приводить к временному ухудшению других параметров. Если такое ухудшение впоследствии становится критическим — соответствующий параметр активируется на одном из следующих тактов. Такой подход допускает возможные колебания между параметрами, но гарантирует локальную устойчивость и детерминированное поведение — что соответствует цели стадии 1: обеспечить минимально необходимый уровень самоподдержания.
, что может приводить к временному ухудшению других параметров. Если такое ухудшение впоследствии становится критическим — соответствующий параметр активируется на одном из следующих тактов. Такой подход допускает возможные колебания между параметрами, но гарантирует локальную устойчивость и детерминированное поведение — что соответствует цели стадии 1: обеспечить минимально необходимый уровень самоподдержания.
Ограничения текущей стадии:
- Отсутствует учёт динамики параметров (трендов, скорости изменения)
- Нет механизма оценки эффективности действий
- Не реализована интеграция состояний
- Возможны осцилляции между параметрами (и между регуляторами одного параметра)
Эти задачи решаются на последующих стадиях архитектуры.
Предварительный анализ архитектуры реактивного ядра на 1 стадии сборки в системе ISIDA
Хотя мы пока еще не имеем возможности провести реальные физические испытания предложенных в архитектуре ISIDA принципов компоновки реактивного ядра автономного агента, мы можем провести предварительную верификацию: насколько предложенные принципы соответствуют новейшим подходам в разработке автономных агентов, современным представлениям нейробиологии. Напомним вкратце основные принципы калибровки ядра на 1 стадии сборки, изложенные в статье:
- На основе предполагаемой среды адаптации агента, его целей и задач, внутреннего устройства, выделяются базовые параметры – контуры регуляции критически важных функций агента.
- Определяются критические уровни значений параметров (пороги), их количество, типы параметров (дефицит ориентированные или избыток ориентированные).
- После анализа полученной системы параметров выбирается их окончательная архитектурная компоновка: сложные многопороговые параметры разбиваются на элементарные регуляторы с одним параметром согласно принципу декомпозиции.
- Путем анализа полученных параметров и среды адаптации агента определяются компенсаторные действия, которые должны срабатывать при активации критических значений элементарных базовых параметров (пересечения их порогов). У каждого компенсаторного действия определяются предполагаемые негативные эффекты: на какие параметры при их запуске возможны негативные воздействия и насколько. Например, все действия энергозатратны, поэтому все они будут негативно влиять на параметр «Энергобаланс». Так же определяются положительные эффекты действия: какие параметры «улучшают» свои значения при выполнении действия и насколько. Так же определяются антагонистические пары компенсаторных действий, которые не должны запускаться одновременно.
- Компенсаторные действия привязываются к определенным параметрам (или группе параметров), «негативные» значения которых становится триггером для их запуска. При каждом такте опроса системы будет активно одно компенсаторное действие с максимальной функцией потребности, рассчитываемой по отдельным формулам для дефицит/избыток ориентированных параметров.
- Запускаются функции валидации как предварительный анализ полученной системы на очевидные на стадии сборки конфликты: противоречивые связи, циклические зависимости, превышение негативного эффекта над позитивным и т.п. В случае обнаружения конфликтов система связей, весов параметров перестраивается.
- Окончательная калибровка ядра на 1 стадии происходит при ее запуске в симуляторе: прогоняются возможные сценарии воздействия на агента и оценивается итоговая эффективность компенсаторных действий. В случае не достаточной эффективности система возвращается на доработку.
Ниже представлен сравнительный анализ предложенной архитектуры ISIDA с существующими теориями в биологии, нейронауках и разработке искусственного интеллекта.
Архитектура реактивного ядра ISIDA на Стадии 1 представляет собой детерминированную, модульную систему порогового управления, основанную на поддержании гомеостаза вектора параметров самоподдержания. Ключевые признаки:
- Гомеостатическое регулирование: Поведение агента инициируется исключительно отклонением внутренних параметров от заданных критических порогов.
- Модульность и композиция: Сложное поведение достигается через композицию независимых, элементарных регуляторных контуров, каждый из которых отвечает за один параметр и один тип отклонения (дефицит/избыток).
- Детерминизм и верифицируемость: Все действия предопределены, верифицированы на этапе калибровки на предмет безопасности и эффективности, что исключает неопределённость в runtime.
- Отсутствие внутренних моделей: Система не использует память, прогнозирование или обучение, опираясь только на текущее сенсорное состояние.
- Приоритизация через функцию потребности: Конкуренция за ресурсы поведения разрешается через вычисление функции потребности (Ui), определяющей степень критичности отклонения каждого параметра.
- Механизм динамической модуляции: Сеть перекрёстных влияний между параметрами моделирует системные, вторичные эффекты от изменений в одном контуре на другие.
Данный подход является строго инженерной, формальной реализацией реактивного подхода, целью которой является создание надёжной, интерпретируемой и верифицируемой основы для последующего наращивания когнитивных функций.
Список соответствий признанным подходам
Полные соответствия
- Принцип гомеостаза (Стадия 1) ↔ Гомеостаз в физиологии (К. Бернар, У. Кэннон).
Обоснование: Поддержание жизненно важных параметров (энергия, температура) в пределах нормы является фундаментальным принципом работы живых систем. ISIDA прямо воплощает эту концепцию через параметры Pi и пороги Ti. - Реактивное ядро, инициируемое отклонением от нормы ↔ Теория драйвов (К. Халл) и теория аллостаза (П. Стерлинг, Дж. Айкер).
Обоснование: В биологии поведение часто запускается для удовлетворения потребностей (драйвов), возникающих при отклонении от гомеостатической уставки. Функция потребности Ui является прямой математической формализацией силы драйва. - Модульная, слоистая архитектура ↔ Субсумционная архитектура (Р. Брукс).
Обоснование: Брукс предложил создавать сложное поведение роботов через добавление слоёв простых, реактивных поведений (например, «избегай препятствий», «исследуй мир»). ISIDA развивает эту идею, формализуя слои не как поведения, а как уровни регуляции (реактивный, прогностический и т.д.). - Принцип композиции элементарных контуров ↔ Модульность в нейронауках (теория функциональных систем П.К. Анохина).
Обоснование: Сложные поведенческие акты формируются из более простых функциональных блоков (афферентный синтез, принятие решения, акцептор результата действий). Декомпозиция параметра «температура» на контуры «нагрева» и «охлаждения» является примером такой модульности. - Механизм динамической модуляции (∆ij) ↔ Теория эмоций как маркеров срочности и перераспределения ресурсов (А. Дамáзио, Я. Пейпец).
Обоснование: Эмоциональные состояния (например, стресс) модулируют приоритеты поведения и физиологические параметры (например, повышая пульс и подавляя пищеварение). Механизм ∆ij формально воспроизводит эти кросс-регуляторные влияния. - Валидация действий на этапе калибровки ↔ Верификация и валидация (V&V) в критических системах (аэрокосмическая, автомобильная отрасли).
Обоснование: Предварительный анализ на отсутствие deadlock'ов, непротиворечивость и безопасность является стандартной практикой при разработке надёжного ПО, что и реализовано в п. 1.6 и 1.7 статьи.
Неполное / Частичное соотвествие
- Конкурентная активация контуров ↔ Теория конкуренции за ресурсы в коре головного мозга.
Соответствие: Идея о том, что в каждый момент времени «побеждает» наиболее сильный сигнал (в ISIDA — максимальный Ui), соответствует нейробиологическим представлениям.
Несоответствие: В мозге конкуренция реализована через сложные механизмы торможения (ГАМКергические интернейроны), латеральное торможение и динамически изменяемые синаптические веса. В ISIDA это жёсткий детерминистический алгоритм выбора максимума, что является сильно упрощённой моделью. - Отсутствие внутренней модели на низком уровне ↔ Гипотеза мира-как-собственной-модели (К. Фристон) и реактивная парадигма (Р. Брукс).
Соответствие: И Брукс, и в некоторой степени Фристон (через идею активного вывода) утверждают, что сложное поведение может возникать без сложной символьной внутренней модели мира.
Несоответствие: Гипотеза активного вывода Фристона, однако, требует генеративную модель для предсказания сенсорных данных и минимизации неожиданности (free energy). ISIDA на Стадии 1 эту модель целенаправленно исключает, что соответствует более ранним работам Брукса, но расходится с современными тенденциями в когнитивной науке, где предсказание считается фундаментальным принципом работы мозга.
Прямые несоответствия / Критика
- Жёсткая детерминированность и предварительная валидация.
Несоответствие: В биологических и большинстве современных AI-систем поведенческие стратегии пластичны и адаптируются в процессе обучения (обучение с подкреплением, пластичность синапсов). Жёсткая фиксация всех действий и их эффектов на этапе калибровки резко ограничивает адаптивность агента в непредвиденных условиях.
Пример: Животное может научиться новому способу добычи пищи. Агент ISIDA на Стадии 1 будет всегда использовать только заранее заложенные действия «поиск энергии», даже если они неэффективны в новой обстановке. - Отсутствие прогнозирования на низком уровне.
Несоответствие: Современные нейробиологические данные (теория прогнозирующего кодирования) указывают, что даже на уровне ствола мозга и спинного мозга работают механизмы предсказания (например, предсказание сенсорных последствий двигательных команд). ISIDA полностью делегирует прогнозирование на более высокие уровни, что является спорным архитектурным решением с точки зрения биологического правдоподобия.
Итоговое обобщение и оценка перспективности
Соответствие научным представлениям
Предложенный подход в целом соответствует established-принципам в робототехнике (реактивный контроль, субсумционная архитектура) и биологии (гомеостаз, теория драйвов). Это не революционная, а скорее систематизирующая и формализующая работа, которая упаковывает известные идеи в строгую инженерную конструкцию (framework) с акцентом на верифицируемость и модульность. Её главная сила — в чётком разделении уровней абстракции и отказе от преждевременного усложнения.
Перспективность
Высокая перспективность для прикладной робототехники, особенно в критических приложениях, где требуются гарантии надёжности и предсказуемости (космос, глубоководные аппараты, автономные транспортные средства). Подход позволяет построить сверхнадёжное ядро, которое не «сломается» в нештатной ситуации, а откатится к базовым реактивным поведенческим паттернам.
Умеренная перспективность для моделирования биологических систем, так как жёсткая детерминированность и отсутствие пластичности на низком уровне являются сильным упрощением.
Потенциальные трудности и препятствия при реализации
- Проклятие размерности: Ручная калибровка и валидация (Ti, Ni, ∆ij, векторы I и C для действий) для системы с большим количеством параметров (n > 10-20) может стать невыполнимой задачей. Требуются автоматические методы для поиска и оптимизации этих значений.
- Жёсткость и хрупкость: Заранее протестированные действия могут оказаться неэффективными в сложных, непредусмотренных средах. Агент будет упорно пытаться применять их, не имея механизма для отказа от неработающей стратегии и импровизации.
- Проблема интеграции с высшими уровнями: Механизм «отката» к реактивному ядру при неопределённости может становиться ловушкой, не позволяя системе перейти к более разумному плановому поведению, если реактивные реакции слишком сильны и приоритетны.
- Биологическое правдоподобие: Как указано выше, отсутствие прогнозирования на низком уровне является ключевым расхождением с современными теориями работы мозга (прогнозирующее кодирование), что может ограничить применение архитектуры для задач, требующих глубокого понимания биологических основ интеллекта.
Указанная критика принимается потому, что на уровне реактивного ядра и не планируется никаких прогнозов и оценок компенсаторных действий, с целью получения нового варианта, альтернативного привычному. Это достигается на следующих стадиях после окончательно сборки и калибровки ядра путем подключения специализированных модулей. Поэтому можно уверенно заявлять, что предложенная архитектура вполне корректна и научно обоснована. Она соответствует принципам, проверенным временем в робототехнике, и предлагает чёткий путь для поэтапного наращивания сложности. Ключевой риск реализации — преодоление сложности калибровки и предотвращение хрупкости системы в условиях открытого мира, что, впрочем, является общей проблемой для всех подходов в ИИ.
Список литературы:
- Kandel, E.R., Schwartz, J.H., Jessell, T.M. Principles of Neural Science, 6th ed. McGraw-Hill, 2021.
- Brooks, R.A. A Robust Layered Control System for a Mobile Robot. IEEE J. Robotics and Automation, 1986.
- Mnih, V. et al. Human-level control through deep reinforcement learning. Nature, 2015.
- Knutson, B., Cooper, J.C. Homeostatic prediction errors in reinforcement learning. Trends Cogn Sci, 2021.
- Meltzoff, A.N., Moore, M.K. Imitation of facial and manual gestures by human neonates. Science, 1977.
- Laird, J. E. (2012). The SOAR cognitive architecture. MIT Press.
- Anderson, J. R. (2007). How can the human mind occur in the physical universe? Oxford University Press.
Список произведений >>
Список публикаций >>
Оценить статью можно после того, как в обсуждении будет хотя бы одно сообщение.
Тест: А не зомбируют ли меня? Тест: Определение веса ненаучности
| Обнаружен организм с крупнейшим геномом Новокаледонский вид вилочного папоротника Tmesipteris oblanceolata, произрастающий в Новой Каледонии, имеет геном размером 160,45 гигапары, что более чем в 50 раз превышает размер генома человека. | Тематическая статья: О вере в полеты американцев на Луну |
Рецензия: Комментарии теории К. Фристона «Предсказательное кодирование и Принцип свободной энергии» | Топик ТК: Физическая суть глобальной информационной картины |