Ознакомьтесь с Условиями пребывания на сайте Форнит Игнорирование означет безусловное согласие. СОГЛАСЕН
Книги сайта: «Мировоззрение»,
«Познай себя» , «Основы адаптологии» ,
Фантазмы , Лекторий МВАП , «Что такое Я» , «Наука», «Субъективность».
Чтобы оставлять сообщения нужно авторизоваться.
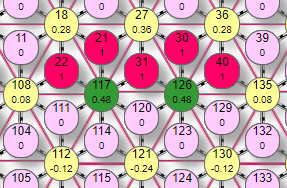
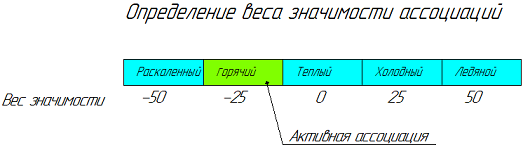
Тема форума: «Нейросимулятор»
| Сообщений: 295 Просмотров: 18635 | | Вся тема для печати |
nan - админ
- админ Род:  Сообщений: 12304 личная фото-галерея  Оценок: 39 Оценок: 39список всех сообщений clons Сообщение № 46659 показать отдельно Май 04, 2020, 07:39:26 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Клон
- unlimited Род: Сообщений: 1177  личная фото-галерея Оценок: 5список всех сообщений clons Сообщение № 46660 показать отдельно Май 06, 2020, 09:18:02 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 46661 показать отдельно Май 06, 2020, 04:42:47 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа:  Благодарность от: Клон Благодарность от: Клон | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46663 показать отдельно Май 09, 2020, 08:25:18 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons История редактирования (1)
Сообщение № 46664 показать отдельно Май 09, 2020, 04:45:54 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons История редактирования (3)
Сообщение № 46665 показать отдельно Май 11, 2020, 07:38:20 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46666 показать отдельно Май 11, 2020, 12:22:05 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 46676 показать отдельно Май 16, 2020, 06:45:43 PM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46677 показать отдельно Май 17, 2020, 06:09:20 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46680 показать отдельно Май 17, 2020, 09:23:28 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46682 показать отдельно Май 17, 2020, 10:52:14 AM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
nan
- админ Род: Сообщений: 12304 личная фото-галерея Оценок: 39список всех сообщений clons Сообщение № 46684 показать отдельно Май 17, 2020, 11:27:41 AM ответ -только после авторизации | |||||||||
p.s. Допускаю, что мое утверждение может быть неверно, поэтому прошу показывать, что именно и почему неверно и запрашивать объяснения, если что-то непонятно. Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons История редактирования (8)
Сообщение № 46686 показать отдельно Май 17, 2020, 12:39:23 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||
|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46693 показать отдельно Май 17, 2020, 06:08:52 PM ответ -только после авторизации | |||||||||
Метка админа: | |||||||||

|
Palarm
- админ Род: Сообщений: 2771 личная фото-галерея Оценок: 6список всех сообщений clons Сообщение № 46741 показать отдельно Май 20, 2020, 07:34:04 PM ответ -только после авторизации | |||||||||
Метка админа: Благодарность от: Айк | |||||||||
Всего Тем: 1929 Всего Сообщений: 47876 Всего Участников: 5225 Последний зарегистрировавшийся: vbmmv
Страница статистики форума | Список пользователей | Список анлимитов
Последняя из новостей:
Страница статистики форума | Список пользователей | Список анлимитов
Про то, что мешает развитию научных идей в Российском обществе, делая практически невозможным их развитие: Особенности культуры и этики в Российской науке.
Пользователи на форуме:| Обнаружен организм с крупнейшим геномом Новокаледонский вид вилочного папоротника Tmesipteris oblanceolata, произрастающий в Новой Каледонии, имеет геном размером 160,45 гигапары, что более чем в 50 раз превышает размер генома человека. | Тематическая статья: О вере в полеты американцев на Луну |
Рецензия: Комментарии к книге Иллюзия себя: Что говорит нейронаука о нашем самовосприятии Г. Бернс | Топик ТК: Самодисциплина – как система волевых установок |
| Из коллекции изречений: >>показать еще... |