Исследования психических явлений
Исследования психических явлений
http://elementy.ru/lib/430320
Тина Катаева
по материалам беседы с Константином
Анохиным
«В мире
науки» №6, 2006
Разум возник в процессе эволюции как инструмент адаптации организмов к меняющейся непредсказуемой среде, как умение выбирать цели, оптимальный образ действий, способность к обучению и формированию представлений.
Исследователи, начавшие заниматься проблемой искусственного интеллекта, были оптимистами. Им казалось, что недалек тот час, когда будет сконструирована умная машина, которая не только научится играть в крестики-нолики или шахматы, но и сможет мыслить как человек. Однако с тех пор прошло почти полвека, а мы по-прежнему находимся на исходной позиции. Но ученые не оставили попыток создать искусственный разум.
Чем концепция старого доброго искусственного интеллекта отличается от современных разработок? Чем искусственный интеллект отличается от естественного? Как создаются и эволюционируют искусственные организмы? Как научить виртуальное существо адаптироваться к внешним обстоятельствам? Что дает исследователям изучение сложных систем на разных уровнях организации? Как организовано мышление человека? Может ли модель суперсознания зародиться в Интернете?
Ответы на эти и ряд других вопросов узнали телезрители программы «Очевидное-невероятное» из беседы профессора Сергея Петровича Капицы с доктором медицинских наук, профессором, членом-корреспондентом РАМН, руководителем отдела системогенеза Института нормальной физиологии им. П.К. Анохина РАМН Константином Владимировичем Анохиным. Но кое-что осталось за кадром.
Старый добрый искусственный интеллект
Герберт Саймон (Simon, Herbert Alexander), американский ученый, лауреат Нобелевской премии и один из отцов искусственного интеллекта (ИИ) в 1957 году утверждал, что через десять лет логические машины смогут обыгрывать в шахматы чемпиона мира, разрабатывать и доказывать новые математические теоремы и даже сочинять музыку.
Увы, надежды, возлагавшиеся на старый добрый искусственный
интеллект (на западе его так и называют — Good Old Fashioned
Artificial Intelligence, GOFAI), не оправдались.
Оказалось, что различные приложения классического искусственного
интеллекта (КИИ), многочисленные программы, в том числе играющие в
шахматы, с трудом адаптируются к динамическим меняющимся условиям.
Поэтому в
Исследователям КИИ казалось, что, пользуясь формальными правилами логики, генерируя синтаксис, создавая логический язык (он получил название «менталез»), можно перейти на более высокий уровень понимания принципов интеллекта. При этом предполагалось, что не имеет значения, на каком субстрате (механическом или органическом) будет создана такая логическая машина. Однако оказалось, что системы, основанные на данных принципах, хотя и работали, но плохо справлялись со сложными адаптивными задачами. По-видимому, обратная разработка (reverse engineering), осуществить которую стремились представители школы КИИ, упускала какие-то важные особенности естественного интеллекта. Постепенно стало ясно, что при попытках реконструировать алгоритмы интеллекта и создать на этой основе искусственный продукт, исследователи не учитывали, что разум впервые появился вовсе не у человека, а развился как следствие постепенно усложнявшегося адаптивного поведения в процессе эволюции.
Слоны не играют в шахматы
В конце 1980-х годов некоторые исследователи начали искать новые подходы к искусственному интеллекту, предполагающие эволюционное моделирование. Молодой американский специалист в области ИИ Родни Брукс (Rodney Brooks) написал в 1986 г манифест, призывающий искать более гибкие и естественные решения, базирующихся на понимании биологии и поведения животных. В статье «Слоны не играют в шахматы» он утверждал, что разум, которым наделены многие существа, даже те, что обладают примитивной нервной системой, возник как инструмент адаптации обладающих телом организмов к меняющейся непредсказуемой среде. Интеллект складывался в процессе эволюции как умение выбирать цели и оптимальный образ действий, как способность к обучению и формированию представлений, вписывающих организм в динамические условия жизни. Кроме того, разум при рождении еще очень прост: щенок не эквивалентен взрослой собаке, а ребенок — зрелому человеку, поскольку значительная часть их жизни посвящена процессам самоорганизации интеллекта и поведения.
Виртуальный подводный мир
|
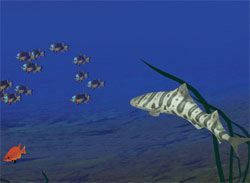
В середине 1990-х годов известный канадский специалист в области компьютерного моделирования Деметрий Терзопулос (Demetri Terzopoulos) создал виртуальный трехмерный подводный мир. Конструкция напоминает океанариум, за тем лишь исключением, что в нем вместо живых акул и скатов плавают виртуальные рыбы, способные эволюционировать. Изначально была смоделирована лишь биомеханика, т.е. элементарные возможности движения и сокращения мышц. А координировать движения и плавать искусственные агенты должны были научиться самостоятельно.
Например, восемь новорожденных виртуальных тигровых акул выстраиваются в ряд. Сначала у них, как у младенцев, наблюдаются лишь беспорядочные движения. Через несколько часов работы суперкомпьютера одна из рыб находит среди возможностей своей нервной системы комбинацию импульсов, позволяющую совершать поступательные движения. Спустя несколько дней все акулята научились быстро плавать, освоили повороты, а затем стали и охотиться.
В искусственном океане происходили и другие чудеса. Так, виртуальная популяция рыб собиралась в стаю, каждая особь следовала за другой, и вели они себя как вполне реальный косяк. Но порой искусственные организмы преподносят сюрпризы. Например, электронный скат не пожелал плавать так же, как его биологический собрат. Самостоятельно освоив азы координации, он выработал способы движения, не свойственные настоящим рыбам. Эволюционируя, такие агенты могут научиться самым неожиданным вещам, следовательно, алгоритмы самоорганизации способны упорядочиваться автоматически.
Что такое хорошо и что такое плохо: уроки эволюции
Говоря о соотношении врожденного и приобретенного знания, австрийский ученый, лауреат Нобелевской премии Конрад Лоренц (Konrad Lorenz) задавался вопросом: «Почему в мире живых организмов обучение практически всегда приводит к адаптации?»
По-видимому, отвечал он, должен существовать некий изначально заложенный механизм, позволяющий организму быстро научиться принимать оптимальные решения. Например, ребенок, мгновенно понимает, что нельзя трогать горячий чайник. Значит, в ходе индивидуального развития нервная система должна сформироваться таким образом, чтобы любая новая ситуация получала правильную для выживания оценку и тем самым достигалась адаптивность. Т.е. саморазвитие индивидуума основано на сформированных предыдущей эволюцией представлениях о том, что для него хорошо и что плохо, что опасно и безопасно и т.д.
Следовательно, чтобы искусственный интеллект был «настоящим», он должен так же, как и естественный, обладать способностью к самообучению и самоорганизации. Современные исследователи искусственного интеллекта стремятся разработать устройства, которые будут иметь не только способность к обучению и соответствующие инструменты, но и систему выработанных ценностей, а также исходный репертуар простых форм поведения, опираясь на которые они смогут оценивать ситуации и адаптироваться к ним.
Эти требования имеют прямое отношение к вопросу, может ли искусственный разум зародиться в Интернете. Специалисты скептически относятся к такой возможности, считая, что во всемирной паутине нет соответствующих предпосылок, свойственных адаптивной биологической самоорганизации.
|
Родни Брукс считает, что автономным роботам нужно тело, определенные органы чувств и умение быстро приспосабливаться к окружающей среде. У них должны быть эволюционно сложившиеся системы врожденного поведения, на котором может строиться дальнейшее обучение и поведение. Эксперименты с такими искусственными агентами будут стимулировать появление новых идей, проливающих свет на принципы адаптивности.
Аниматы
Попытки моделировать адаптивное поведение предпринимались еще в
50-е годы ХХ в., но из-за увлечения классическим
искусственным интеллектом не получили развития. Правда,
справедливости ради стоит упомянуть появившуюся в
Основой для создания роботов могут быть как реальные живые существа, например пауки, осы, крысы и т. д., так и нечто абстрактно-символическое, например оригинальная операционная логика. Но наиболее популярный в наши дни способ создания интеллектуальных машин — искусственная эволюция. Чтобы развитие нервной системы шло в нужном направлении, разработчик должен задать определенный набор примитивных понятий, правила принятия новых решений и критерии отбора. Пионером подобного обучения роботов, основанного на правилах отбора в нервной системе, стал нейробиолог-теоретик, Нобелевский лауреат Джеральд Эдельман, сконструировавший со своими сотрудниками в Институте нейронаук в Калифорнии серию подвижных адаптирующихся устройств NOMAD (Neurally Organized Mobile Adaptive Devices), имеющих родовое имя «Дарвин». Сегодня создано уже четвертое поколение таких систем.
Адаптивное поведение аниматов
Целенаправленно реконструировать принципы адаптивного поведения специалисты по ИИ начали в 1990-е годы. Эти исследования и положили начало разработке моделей аниматов. Сейчас это направление активно развивается, регулярно проводятся конференции Simulation of Adaptive Behavior (From Animals to Animats), издается журнал Adaptive Behavior. Исследователи надеются, что на основе анализа эволюции когнитивных способностей животных и с учетом особенностей интеллекта человека им удастся создать действительно умный искусственный организм.
Сегодня идет поиск общих принципов архитектуры адаптивного поведения. Сначала ученые пытались моделировать поведение насекомых — пауков, пчел, ос. Например, в возглавляемой Родни Бруксом (Rodney Brooks) лаборатории искусственного интеллекта Массачусетского технологического института (MIT), где изучается широкий спектр интеллектуальных и адаптивных систем, включая создание разумных роботов, было смоделировано самодвижущееся шестиногое 35-сантиметровое насекомое-робот Genghis. Оно передвигалось, преодолевало препятствия, адаптировалось к конкретным условиям и принимало самостоятельные решения. Сегодня сотрудниками лаборатории разрабатываются обезьяноподобные и мобильные роботы (Kismet, Сосо) с гораздо более сложным поведенческим репертуаром: предполагается, в частности, что они будут способны к социальным взаимодействиям и эмоциональным реакциям.
|

В Парижской лаборатории Animat Lab работают с искусственным агентом Hexapod, напоминающим Genghi. Под руководством основателя данного направления Ж.-А. Мейерa (J-A. Meyer) проводятся исследования адаптивного поведения животных и роботов. Предполагается, что система управления анимата может формироваться и модифицироваться посредством обучения, индивидуального развития (онтогенеза) и эволюции. Сегодня в Animat Lab разрабатывается проект Psikharpax — король крыс. Ученые стремятся создать робота, в котором будет синтезирован ряд адаптивных механизмов и нервных структур, ответственных за адаптивное поведение и пространственную ориентацию у крыс. Способности электронного зверя будут развиваться за счет «обучения без учителя», т.е. он будет сам строить когнитивную карту среды и вырабатывать адаптивные стратегии поведения, схожие с теми, что использует мозг крысы.
В Англии, в университете Сассекса (University of Sussex), работает центр вычислительных нейронаук и роботики (CCNR), также создающий интеллектуальные насекомообразные существа. В этом же университете была предпринята попытка смоделировать эволюцию группового поведения аниматов, а также создать модель «хищник-жертва».
Лаборатория искусственного интеллекта в университете Цюриха, которой руководит Рольф Пфейфер (Rolf Pfeiffer) разрабатывает подходы понимания природы интеллекта путем его создания (understanding by building). Она включает построение моделей биологических систем, исследование общих принципов естественного интеллекта животных и человека, их использование при конструировании роботов и других искусственных интеллектуальных систем.
Лаборатория искусственной жизни и роботики в Институте когнитивных наук и технологий в Риме, руководимая Стефано Нолфи (Stefano Nolfi), ведет исследования эволюционной роботики и принципов формирования адаптивного поведения.
Нейробиология когнитивных процессов
Помимо моделирования адаптивного поведения, современных исследователей в области ИИ интересует непосредственное изучение процессов мышления, восприятия и других высших функций мозга. Сложность этой задачи заключается в том, что наш мыслительный аппарат состоит из около 1011 нейронов, которые образуют между собой примерно 1014 связей и способны к бесчисленному множеству возможных взаимодействий. Даже если можно было бы описать работу всех клеток мозга человека в любой момент времени, всё равно не удастся понять, как же функционирует столь сложный механизм, как возникают мышление, восприятие, психика.
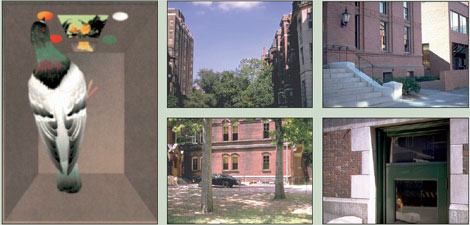
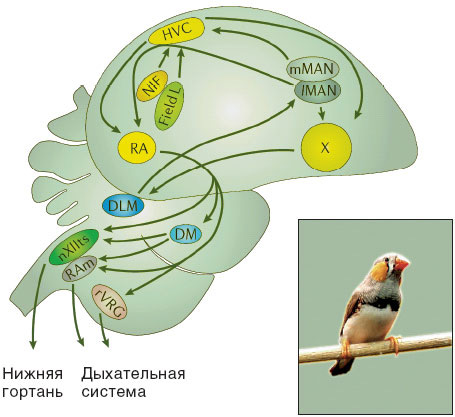
Более того, исследователями установлено, что одни и те же задачи успешно решают нервные системы с совершенно разным строением. Допустим, возьмем вопрос, поставленный еще И.М. Сеченовым: как мозг формирует абстрактные категории? Существующие методы функционального нейрокартирования позволяют сегодня увидеть, какие области человеческого мозга вовлекаются в выработку абстрактных понятий. Но одно их описание не даст ответа на вопрос о фундаментальных принципах процесса категоризации. Серия экспериментов, проведенных американскими психологами Ричардом Гернштейном (Richard Herrnstein) и Джоном Сереллой (John Cerella), показала, что формировать абстрактные категории могут не только люди, но и птицы. Голубям показывали серии цветных слайдов и награждали их пищей только в том случае, если они касались клювом изображений деревьев. Вскоре птицы научились безошибочно отличать на новых картинках деревья от строений, автомобилей, даже кустарников или, например, от снятой крупным планом ботвы сельдерея (рис. 1). Так удалось выяснить, что, хотя мозг пернатых устроен совсем иначе, чем у высших млекопитающих, и они могут мыслить категориями. А опыты З.А. Зориной и сотрудников кафедры высшей нервной деятельности МГУ продемонстрировали, что некоторые птицы, например вороны, обладают и выраженной способностью к счету.
|
Механизмы категоризации, памяти и преследования определенной цели работают не только у человека и птиц, но и у пчел. Как показал немецкий нейробиолог Рандольф Менцель (Randolf Menzel), пчелы способны запоминать, с каких цветов они уже собрали мед, и к каким направляются, даже если убрать их из поля прямой видимости. А между тем в мозге насекомого в миллион раз меньше нейронов, чем у человека, в нем нет ни одной структуры, похожей на высшие отделы человеческого мозга, отвечающие за рабочую память и концентрацию на поставленной цели.
|
Нервная система червя C. elegance, излюбленного объекта молекулярной генетики развития, состоит всего из 302 нейронов, содержит лишь около 5 тыс. связей, однако и ему присущ достаточно сложный репертуар поведения. Более того, исследования последних лет показали, что червь способен вырабатывать условные рефлексы, используя те же правила, которые И.П. Павлов открыл, изучая собак. Из вышесказанного следует, что фундаментальные свойства интеллекта способны реализоваться у живых существ с самой разнообразной архитектурой нервной системы. Следовательно, для моделирования разумного поведения требуется нахождение тех общих принципов, на основании которых природа создавала когнитивные способности у организмов с самой разной, часто очень отличающейся от человека нервной системой.
Теория функциональных систем
В поисках биологически обоснованных правил построения ИИ ученые обращаются сегодня к теориям работы мозга, объясняющим устройство естественного интеллекта.
Одна из них — теория функциональных систем (ТФС), созданная в середине ХХ в. русским физиологом П.К. Анохиным. Она описывает особый слой процессов в мозге, определяющих когнитивные функции и адаптивное поведение человека и животных.
Свойства сознания, психики и разума, как предполагает ТФС, являются не проявлениями работы тех или иных отдельных зон мозга. Они возникают в результате объединения клеток многих областей в организованные надклеточные структуры, получившие название функциональных систем, поскольку их деятельность тесно связана с выполнением тех или иных функций организма. ТФС призвана понять специфические принципы самоорганизации систем, ведущих к появлению адаптивного поведения со всеми его психологическими атрибутами.
Современные методы нейронаук дают возможность наблюдать в эксперименте за тем, как в мозге образуются такие функциональные системы. Ученые из лаборатории нейрофизиологических основ психики Института психологии регистрировали работу нервных клеток разных отделов мозга у бодрствующих, свободно передвигающихся животных. Оказалось, что в самых различных областях мозга во время поведения синхронно активируются миллионы нервных клеток, и их совместная активность завершается, когда животное достигает цели. Проведенные эксперименты подтвердили три важнейших положения ТФС: подобные системы должны быть целенаправленными, распределенными (т.е. для достижения общего результата объединяются элементы разных структур) и синхронизованными.
Прозрачный мозг
Мозг, работающий по принципу функциональных систем, бросает серьезный вызов исследователям. Они должны научиться наблюдать за тем, как распределенные по всему мозгу клетки объединяются в системы, решающие те или иные адаптивные задачи. Как найти и увидеть нейроны среди миллионов других клеток мозга, не участвующих в данном поведении? Как понять принципы вовлечения отдельных нейронов в систему и проследить связи разных систем в формирующемся опыте организма? Решение этих вопросов требует новых подходов к изучению мозга, поиски которых ведут исследователи в отделе системогенеза, возглавляемом К.В. Анохиным. Цель их проекта, объединяющего методы нейронаук, молекулярной биологии, физики и компьютерного анализа изображений, — сделать мозг максимально «прозрачным» для исследователя, чтобы можно было воочию увидеть нервные процессы, лежащие в основе формирования и работы сложных функциональных систем.
|
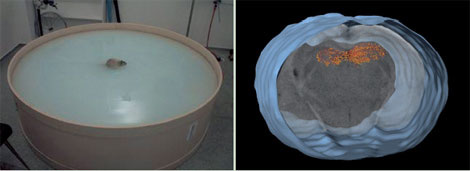
Один из этих подходов использует гены, активирующиеся в нервных клетках при запоминании новой информации. Специальные молекулярные зонды позволяют ученым выявить нейроны, в которых эти гены работают при обучении, а современные методы компьютерного анализа изображений дают возможность реконструировать затем весь «след памяти» в мозге животного. Эти эксперименты показывают, что каждый, даже минимальный эпизод нового опыта, дает импульс к изменению работы генов в миллионах нервных клеток: мозг и во взрослом возрасте никогда не прекращает свои развитие и самоорганизацию. Использование двойных и тройных меток позволяет сегодня исследователям задавать вопросы, как новые функциональные системы образуются и взаимодействуют при формировании адаптивного поведения.
Танцующий робот
В последнее десятилетие моделирование адаптивного поведения аниматов и исследование принципов самоорганизации функциональных систем мозга, обеспечивающих адаптацию у биологических организмов, сближаются. Вместе с исследователями из институтов прикладной математики, оптико-нейронных технологий и с факультета вычислительной математики и кибернетики (ВМК) МГУ, группа К.В. Анохина работает над новым синтетическим проектом «Мозг анимата». Он посвящен моделированию поведения умных машин на основе принципов работы ФС.
|
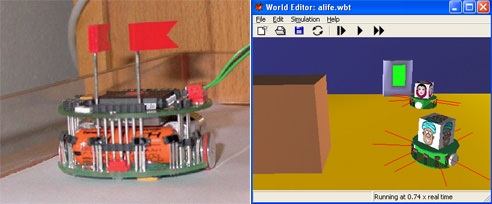
В одном из экспериментов анимат — модель робота «Хепера» (Khepera) — помещается в ограниченное стенками пространство, где расставлены всевозможные цилиндрические столбики, на некоторых установлены батарейки. Когда запасы энергии истощаются, искусственный агент начинает искать источник питания. Чтобы выжить, он должен научиться отличать стены от предметов, и активные батарейки, излучающие зеленый свет, от разряженных, горящих красным огоньком. Согласно изначальной программе, анимат может подъехать к батарейке, зарядиться и остаться около нее. Однако если он не отправится дальше в поисках нового источника питания, он «умрет» от голода. Таким образом, робот должен сам научиться тому, что не было заложено в программу.
|
В результате искусственной эволюции один из «питомцев», который прошел путь до 64 поколения (в каждом поколении было по 50 агентов), начал вести себя очень странно. Он вращался вокруг своей оси до тех пор, пока уровень его энергии не падал до критического. Затем автомат подъезжал к ближайшему источнику питания, заряжался и опять начинал крутиться рядом с бесполезной красной батарейкой, вновь теряя силы. Потом он начинал колебаться между двумя источниками, приняв решение, двигался в сторону ближайшего из них, подпитывался и опять начинал «танцевать». Исследователи предположили, что, вращаясь, он осматривается по сторонам, локализуя своим зрением расположенные поблизости источники зеленого света. Поэтому, когда уровень энергии падал ниже критического, он уже знал, куда двигаться, и без промедления направлялся к ближайшему источнику питания. Предсказать, что такая стратегия возникнет в результате эволюции всего 64 поколений автоматов, было невозможно. Однако подобное происходит регулярно, причем у разных исследователей и в самых разных ситуациях. Когда специалисты по моделированию адаптивного поведения создавали нервную систему искусственных агентов даже из небольшого количества клеток и запускали эволюционный цикл, часто возникали абсолютно неожиданные формы приспособительного поведения. «Подопытные» находили совершенно непредсказуемые способы решения своих задач, причем зачастую гораздо более простые, чем могли предвидеть и заложить в программу разработчики.
Всё только начинается
Создавая искусственные интеллектуальные системы, ученые получают возможность подсматривать за работой модельных нервных клеток, что пока не удается делать с реальными живыми существами, несмотря на все возможности функционального нейрокартирования и других новейших методов исследования мозга.
Даже относительно простые организмы, например, пчелы, улитки, или дрозофилы, обладают нервной системой, состоящей из десятков и сотен тысяч нейронов. Никакие самые современные методы не позволяют одномоментно увидеть работу всех этих клеток, не дают возможность наблюдать их взаимосвязи и понять, что происходит с каждым из нервных контактов в момент совершения организмом какого-либо действия. Изучая же поведение искусственных агентов, ученые могут не только отслеживать процесс эволюции и обучения своих аниматов, но и видеть, как работает их нервная система в целом, все контакты в ней, каждая клетка. И оказывается, например, что некоторые нервные клетки аниматов постепенно начинают специализироваться на тех или иных абстрактных компонентах среды. Они категоризируют предметы или некие действия точно так же, как и человеческий мозг, выполняя определенные задачи, распознает лица или объекты в пространстве. Разрабатываемые сегодня направления (эволюционное моделирование, изучение адаптивного поведения и работы функциональных систем, исследование высших функций мозга и когнитивных механизмов) могут внести неоценимый вклад в понимание фундаментальных законов и принципов создания как естественного, так и искусственного интеллекта.
Дополнительная литература:
Анохин П.К. Кибернетика функциональных систем. М.:
Медицина, 1998.
Зорина З.А., Полетаева И.И. Зоопсихология.
Элементарное мышление животных. М.: Аспект Пресс, 2003.
От
моделей поведения к искусственному интеллекту // Под ред.
В.Г. Редько.- М.: КомКнига, 2006.
Саймон Г. Науки об
искусственном. М.: Мир, 1972.
Beckoff M. et al. (Eds.) The
Cognitive Animal. Empirical and Theoretical Perspectives on Animal
Cognition. The MIT Press: Cambridge, Massachusetts, London,
England. 2002.
Brooks R. Cambrian Intelligence. The Early
History of the New AI. The MIT Press: Cambridge, Massachusetts,
London, England. 1999.
Doupe A.J, Kuhl P.K. Birdsong and human speech:
common themes and mechanisms // Annual Reviews of Neuroscience,
1999; 22: 567-631.
Edelman G., Tononi G., Consciousness.
Penguin Press, 2000.
Nolfi S., Floreano D. Evolutionary
Robotics. The Biology, Intelligence and Technology of
Self-Organizing Machines. The MIT Press: Cambridge,
Massachusetts, London, England. 2003.
Meyer J.-A., Wilson S. W.
(Eds) From Animals to Animats. The MIT Press: Cambridge,
Massachusetts, London, England. 1990.
Pfeiffer R., Scheier C.
Understanding Intelligence. The MIT Press: Cambridge,
Massachusetts, London, England. 1999.
Reynolds C. W. Flocks,
herds, and schools: A distributed behavioral model // Computer
Graphics, 1987; 21: 25-34.
Terzopoulos D., Tu X., Grzasczuk R.
Artificial fishes: Autonomous locomotion, perception, behavior,
and learning in simulated physical world // Artificial
Life,1994; 1: 327-351.