В схеме показан принцип, как в природной нейросети происходит регулировка состояния гомеостаза (гомеостатического балланса), которая служит основой для ветвления безусловных рефлексов, которые в свою очередь служат базой для формирования условных. Схему можно наращивать, добавляя новые сенсоры и нейроны: пример развития схемы.
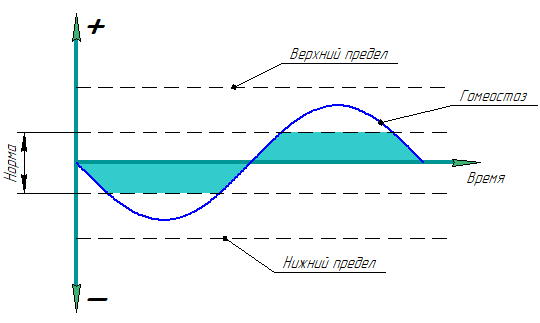
Рассуждая о гомеостазе не корректно говорить, что он стал лучше/хуже, потому, что отклонение от нормы в любую сторону это плохо. Например замерзнуть или свариться. Правильнее говорить о некотором диапазоне отклонения от оптимального состояния, которое незначительно влияет на гомеостаз. И границах по обе стороны этого диапазона, пересечение которых означает физическую смерть. И тогда гомеостаз можно представить графически в виде постоянных колебаний вокруг оси оптимума. При этом иногда амплитуда колебаний выходит за пределы оптимальных значений и требуются компенсирующие меры для ее возрата.
Принцип формирования звена
В природной реализации формирование безусловных рефлексов происходит эволюционным путем: по мере все более точного определения параметров внешнего воздействия возникают все более точные корректирующие рефлексы. Успешные рефлексы зарепляются естественным отбором. При этом новые рефлексы вовсе не случайно-хаотичны, а всегда строятся на базе предыдущих, являясь их продолжением. Это происходит потому, что диапазоны новых рецепторов перекрывают диапазоны старых, что означает частично общие связи у новых и старых рефлексов, и новая реакция формируется по принципу: усилить или ослабить старый вариант действия, а не сделать что то вообще новое, в отрыве от предыдущих попыток. Ниже будет обосновано, почему именно такая стратегия оптимальна.
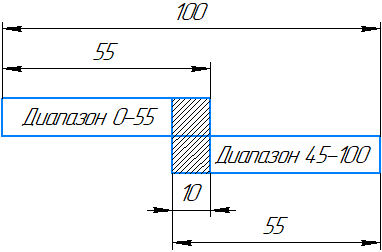
Схема собрана по алгоритму в два этапа:
- устанавливаются активные связи от активных сенсоров с весом (1+порог)/кол-во сенсоров
- устанавливаются тормозные связи от активного на шаге эффектора ко всем другим с весом (1+порог)/кол-во активных эффекторов
Два сенсора S1 и S2 показывают влияние внешней среды, например температуры. Их диапазоны достаточно большие, чтобы перекрываться. Это важно. Потому, что в таком случае появляется "виртуальный сенсор" среднего значения внешнего воздействия, который условно будем считать комфортным, то есть мало влияющим на гомеостаз.
Два датчика G1 и G2 показывают состояние гомеостаза. Когда активен G1 - гомеостаз ниже нормы, когда G2 - выше, а когда оба - в норме. Эти датчики так же имеют свои перекрывающиеся диапазоны, и при одновременной активации показывают средний, комфортный уровень.
Ветвление рефлексов
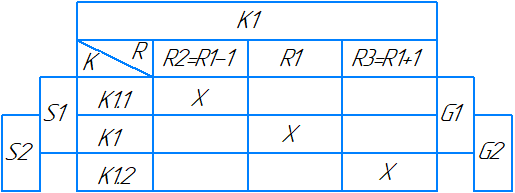
Изобразим схему в виде таблицы, где S - сенсоры, R - рефлексы, K - контексты, G - датчики гомеостаза. Условно принято, что реакция гомеостаза на внешнее раздражение мгновенна, поэтому при внешнем негативном воздействии вместе с S1 одноврменно активируется и G1, которые активируют рефлекс R2, приводящий гомеостаз в норму. Аналогично парно активируются и S2, G2 запуская рефлекс R3. А когда активируются обе пары рецепторов G1, G2, S1, S2 - это означает среднюю температуру и соответствующую активацию рефлекса комфортного состояния R1.
Рефлекс R2 это клон рефлекса R1, но с более низкой активностью. Аналогично R3 это клон рефлекса R1, но с более высокой активностью. Изменние активность показано как + или - 1 условная единица.
Контекст К1 означает, что есть область внешнего воздействия, в которой активируется несколько сенсоров, имеющих связи с рефлексами. Если эти рефлексы объединить в общую группу, а так же связанные с ними сенсоры в свою группу, то в итоге получается, что в схеме появляется некий групповой сенсор, реагирующий на группу признаков, и активируемый им групповой рефлекс. На самом деле их нет, это условности, но они позволяют заметить определенную закономерность в процессе формирования ветвлений, а именно: новый рефлекс формируется на базе старого по принципу усиленной или ослабленной его копии. При этом само рефлекторное действие может качественно меняться: шаг превращаться в бег, бег в галоп, потом в прыжки, планирование, полет и т. д. Аналогично наоборот. В самом деле, если прежний рефлекс не позволяет в новых условиях привести гомеостаз в норму, то есть 3 варианта действий:
- сделать что то совсем другое, случайным образом
- усилить активность рефлекса
- ослабить активность рефлекса
Вариант 1 сразу отпадает потому, что во первых процент удачных попаданий прямо пропорционален количеству попыток, то есть требуется достаточно длительный эволюционный процесс. Во вторых, и это главное - такая стратегия не является ветвлением, так как каждый рефлекс сам по себе, формируется случайным образом без связи с предыдущим состоянием. Это быстро исчерпает вариабельность реагирования, так как с каждым следующим рефлексом будет возрастать вероятность сделать фатальную ошибку, обрушивающую всю систему. Ведь рефлекс может повлиять на работу предыдущих и при случайном формировании это никак не ограничивается. Только постепенное усложнение, с обязательной связью с предыдущим узлом, позволяет теоретически бесконечно усложнять рефлекторную систему.
Варианты 2 и 3 более предпочтительны, но тут возникет проблема, какой из них выбрать. Так как мы говорим от системе безусловных рефлексов, где нет прогностических анализов, сопосталвения с субъективными моделями и т. п. нет никакой возможности предугадать, как в конкретной ситуации будет эффективнее: сформировать рефлекс с более сильным или более слабым по сравнению с предыдущим рефлексом действием. Тут возникает аналогия с блужданием в темной комнате, когда только коснувшись стены можно сделать какой то вывод о своем местоположении. Но проблема в том, что в комнате есть две перегородки под высоким напряжением, коснувшись любой из них неминуемо погибнешь, и только одна, третья перегородка не убивает и она является целью блужданий.
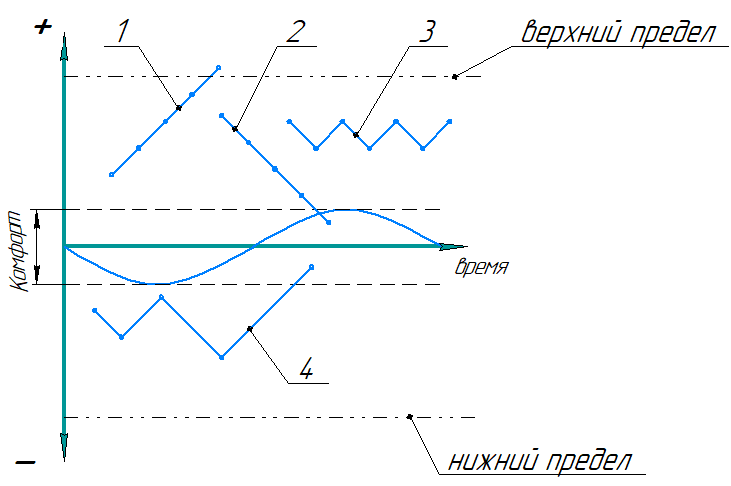
Допустим случайным образом выбран вариант в сторону увеличения (вариант 1). Если начальный рефлекс был в зоне пониженной активности, то это удачный вариант, а если в зоне повышенной - то в итоге цепочка пересечет верхнюю граничную "зону смерти". То есть тут все зависит от первого шага. Аналогично с вариантом 2. Вариант 3, если каждый новый рефлекс будет противоположно направлен предыдущему, приведет к колебанию вокруг оси. Наиболее успешна стратегия 4, когда каждый новый шаг направлен в противоположную сторону и больше по амплитуде к предыдущему. Так повышается вероятность на каком то из шагов попасть в зону комфорта. Она тем выше, чем ближе к зоне комфорта начальное состояние ветвлений.